Climbing mechanism used for comprehensive pipeline routing inspection robot
A technology for inspecting robots and pipelines, applied in the field of climbing mechanisms, can solve the problems of increased costs for guide rails, the influence of guide rail maintenance, and the inability to change the pipeline to walk.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
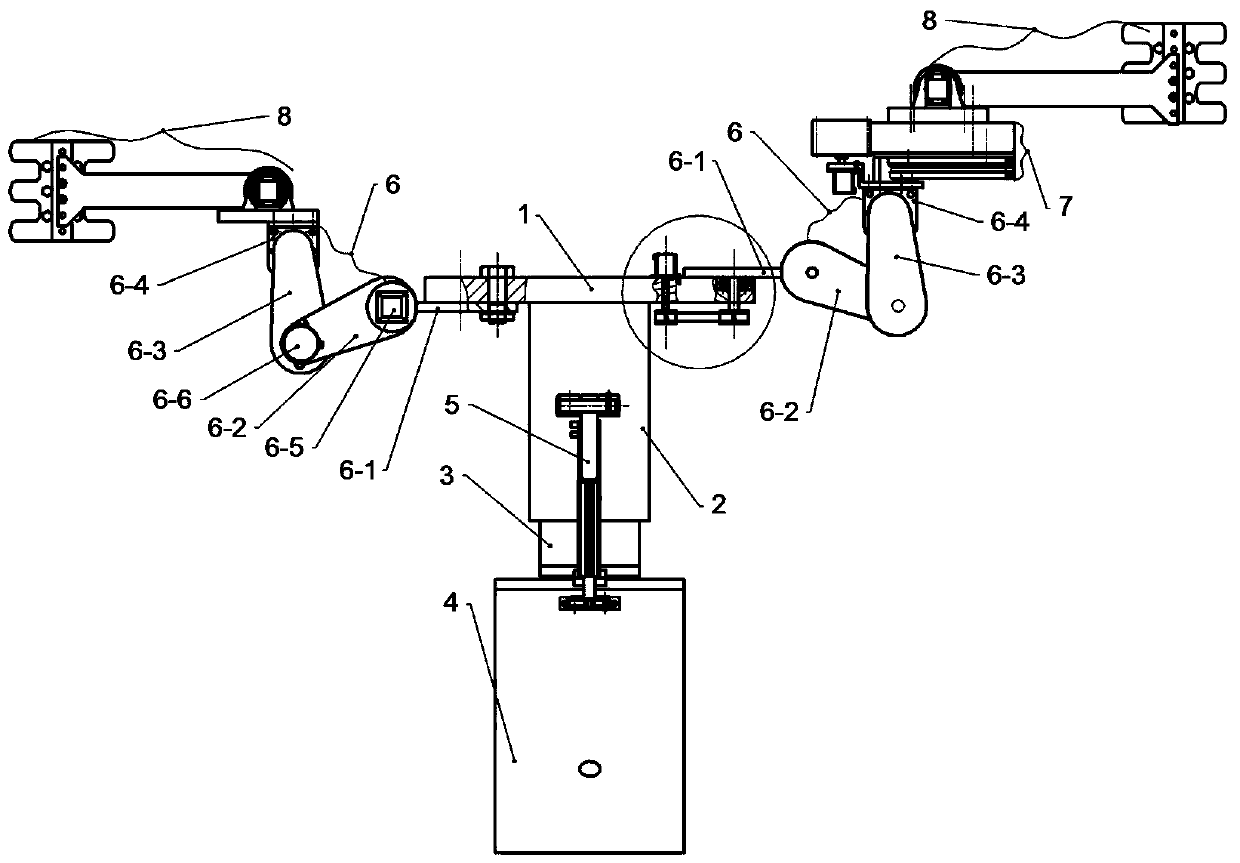
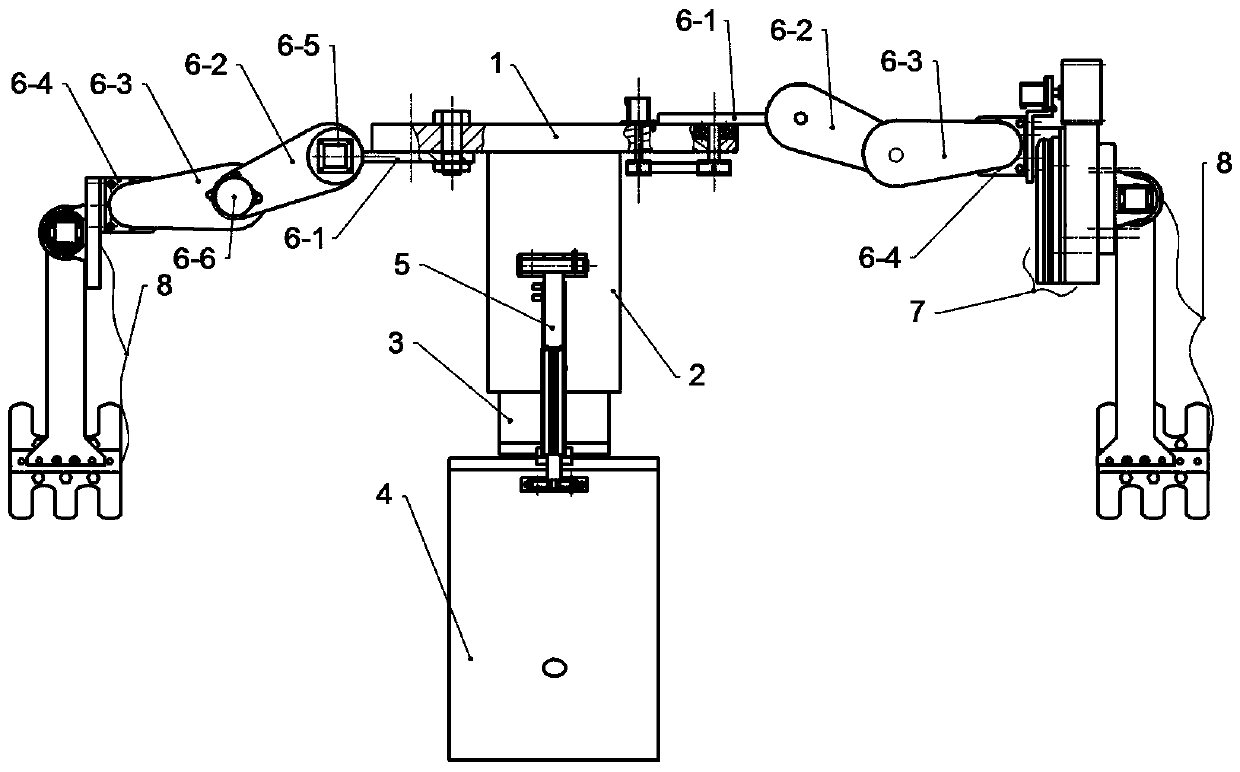
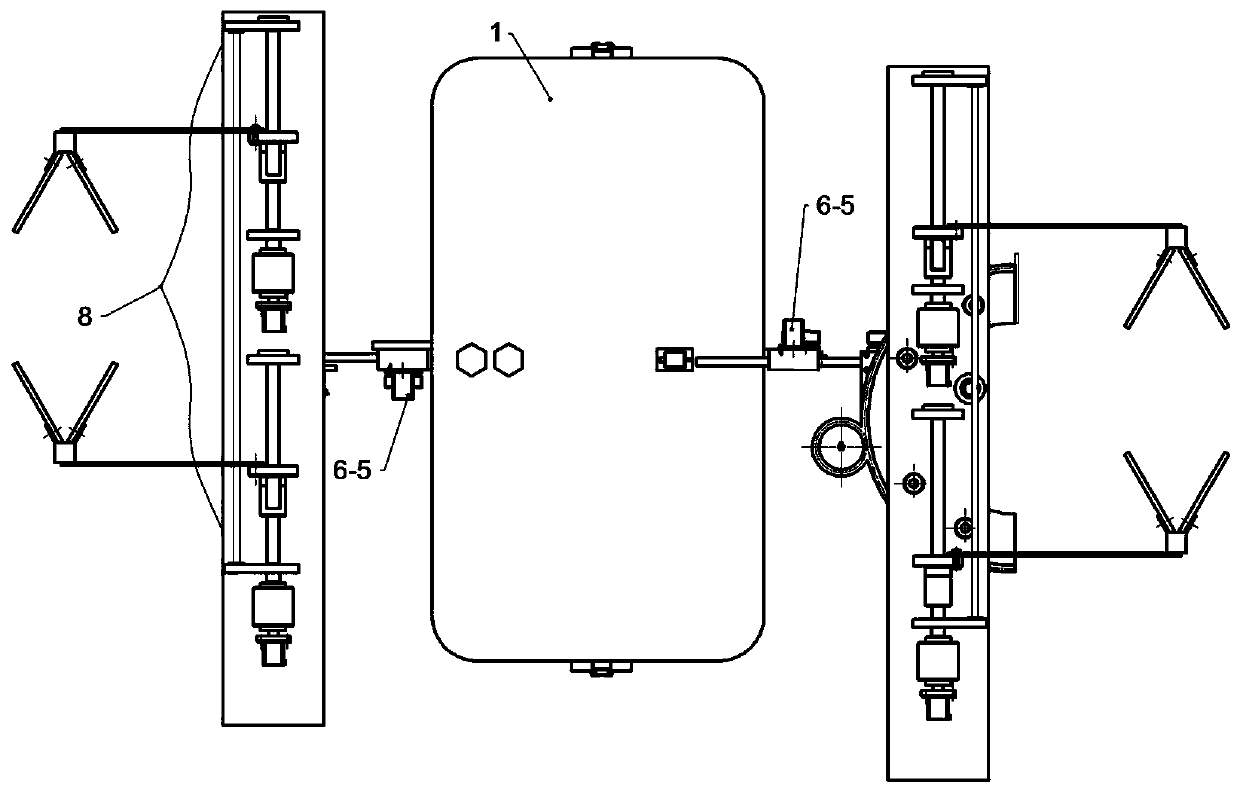
[0040] The specific embodiment of the present invention sees Figure 1-16 :
[0041] A climbing mechanism for an integrated pipeline inspection robot, such as Figure 1-5 , 7-10, including main traveling mechanism and auxiliary traveling mechanism;
[0042] The main walking mechanism includes the main platform 1, the connecting frame 2 and the ring-shaped walking frame fixedly connected in sequence from top to bottom. The upper part of the walking frame is a semicircular arc frame I3, and the lower part is a quarter arc Arc-shaped frame II4, the lower part of the main platform 1 is connected to the connecting frame 2 of the arched structure, the lower part of the connecting frame 2 is a concave arc surface and is fixedly connected with the arc-shaped frame I3, and the two sides of the connecting frame 2 respectively pass through the electric cylinder 5 Connect with two curved frames Ⅱ4;
[0043] The two arc frames II4 are respectively hinged with the arc frame I3 through hi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com