

Water surface unmanned ship collision avoidance method based on ship domain model
A technology in the field of ships and unmanned boats, which is applied in the field of collision avoidance of unmanned boats on the water surface, can solve complex problems, and achieve the effect of improving the degree of regulation and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
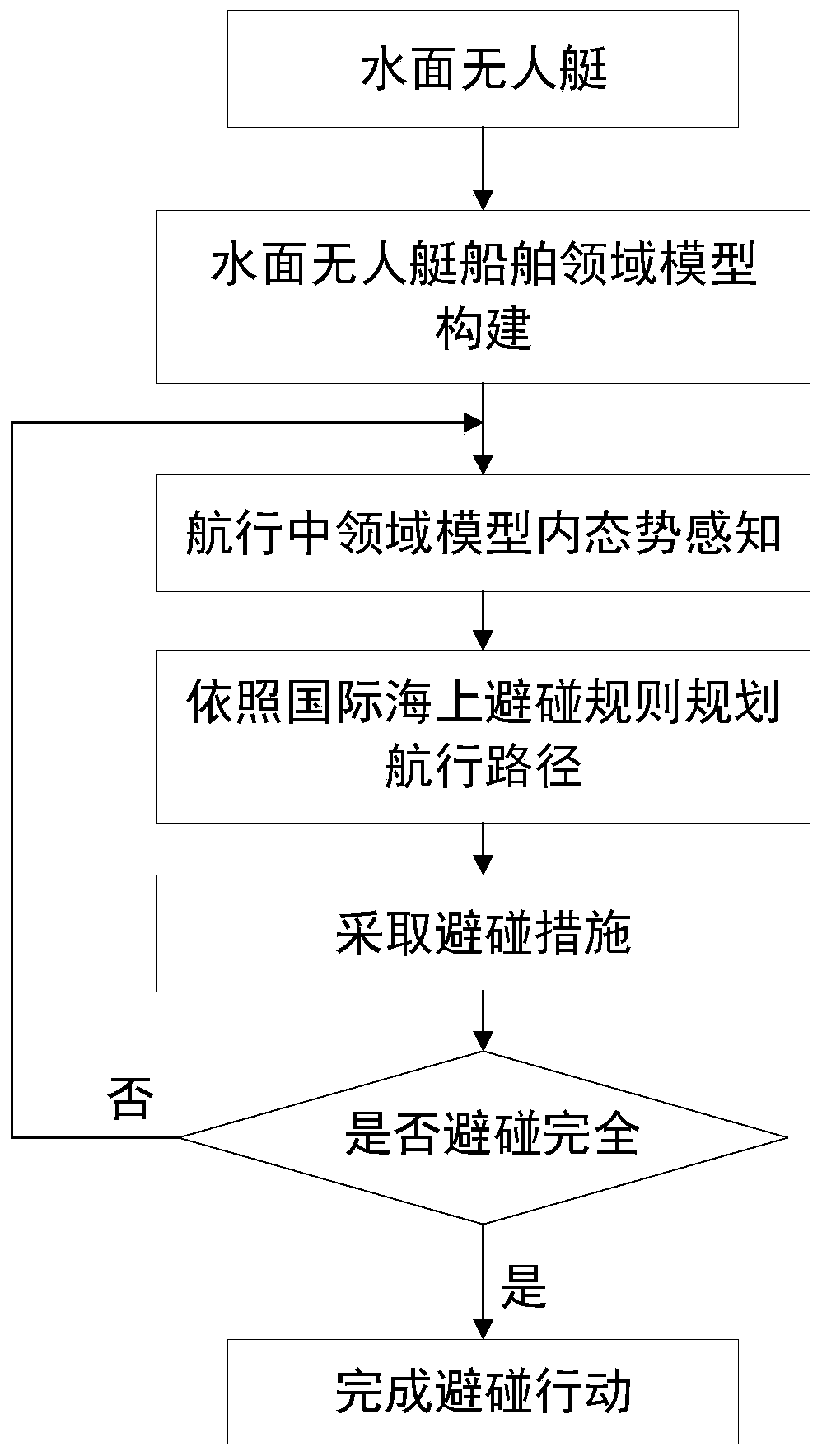
[0023] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments. figure 1 It is a flow chart of the method for avoiding collisions of surface unmanned boats based on the ship field of the present invention, and the specific process is:
[0024] Step 1. Construction of the domain model of the surface unmanned vehicle;
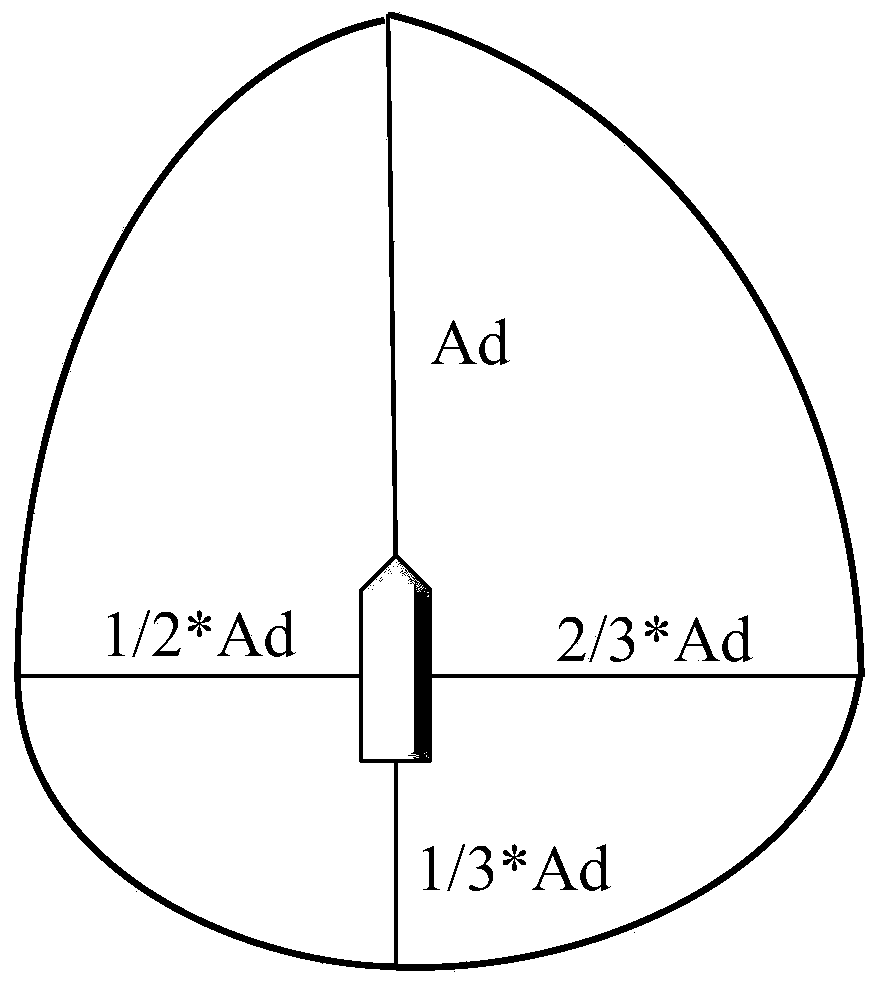
[0025] Furthermore, the ship domain model is an approximately elliptical area, but the lengths of the front, rear, left, and right semi-axes of the model are not completely consistent according to the requirements in collision avoidance. The advance distance of the surface unmanned boat (the longitudinal movement distance of the center of gravity of the unmanned boat when the heading angle changes by 90°, generally represented by Ad) is taken as the unit. Since the unmanned surface vehicle mainly turns to the right during the collision avoidance process,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More