

A Data-Driven Controller for Model Unknown Systems
A data-driven, controller technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., to achieve the effect of improving control accuracy
Active Publication Date: 2022-05-31
DALIAN MARITIME UNIVERSITY
View PDF7 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0007] According to the above proposal, when the existing control method is applied to the first-order uncertain nonlinear motor system, it cannot deal with the nonlinear uncertainty of the system and the real-time external disturbance, it needs to assume that the control coefficient is known, and the convergence of the estimation error depends on continuous excitation conditions and other technologies problem, and provide a data-driven controller structure for model-unknown systems, which can not only estimate the time-varying uncertainties and external disturbances in nonlinear motor systems, but also estimate the control coefficients of motor systems online
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0052]
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
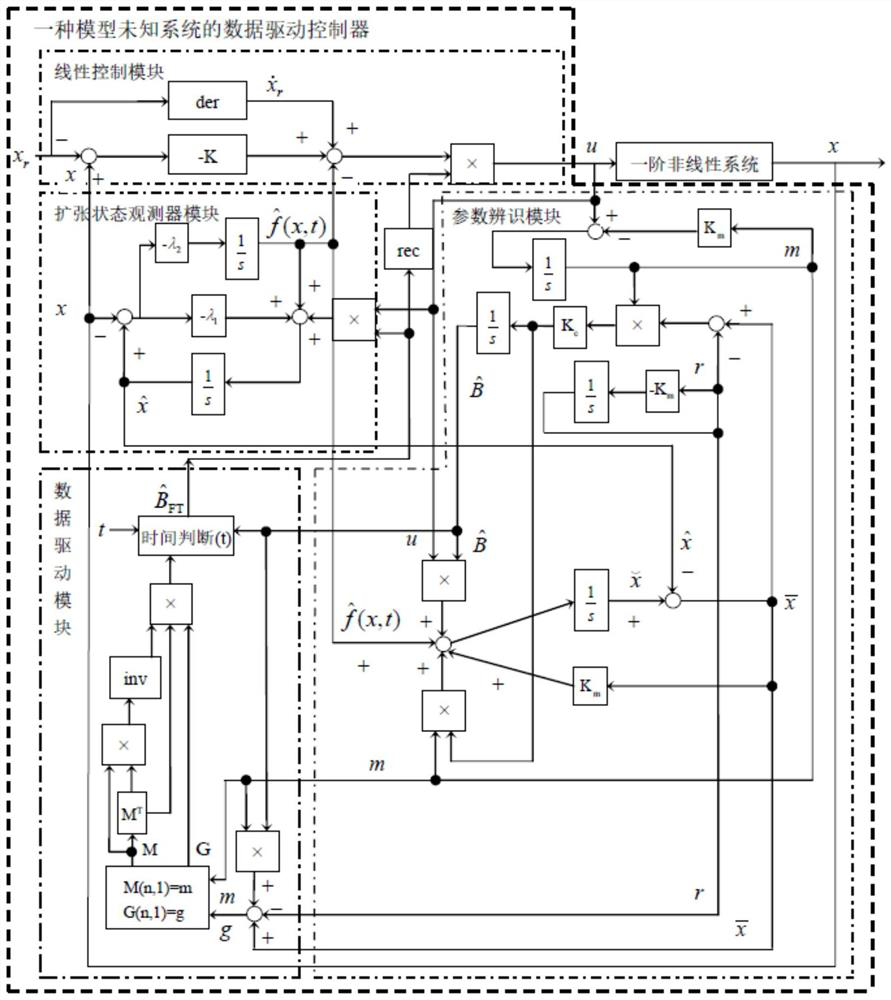
The invention provides a data-driven controller for a model-unknown system, which takes a first-order nonlinear system as the controlled object, the input end of the controller is connected with the reference signal, and the output end of the controller is connected with the input end of the controlled system, including Extended state observer module, parameter identification module, data-driven module and linear control module. The data-driven total disturbance and control coefficient estimation method proposed in the present invention can not only estimate the control parameters, but also realize the unified estimation of internal and external disturbances. control precision.
Description
A Data-Driven Controller for Model Unknown Systems technical field The present invention relates to uncertain nonlinear system control field, relate in particular to unknown first-order time-varying uncertainty of control parameters Determining the structure of a nonlinear system controller. Background technique [0002] Many practical control systems, such as motor systems, robotic systems, aircraft systems, ship autopilot systems, etc., are It has the characteristics of time-varying nonlinearity, parameter uncertainty, etc., and there are external disturbances, which bring difficulties to the system control. with challenges. Therefore, for the model unknown system, an estimation method of model uncertainty, external disturbance and control coefficient is proposed to realize The precise control that does not depend on model parameters has important research significance and theoretical value. The adaptive parameter identification method is applied in the design of ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G05B13/02
CPCG05B13/024Y02P90/02
Inventor刘陆杨安馨王丹彭周华李铁山
OwnerDALIAN MARITIME UNIVERSITY