

Aperiodic communication underwater glider cooperative controller structure and design method thereof
An underwater glider, communication mechanism technology, applied in general control system, adaptive control, comprehensive factory control and other directions, can solve problems such as affecting control accuracy, unknown external interference, and difficult to achieve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
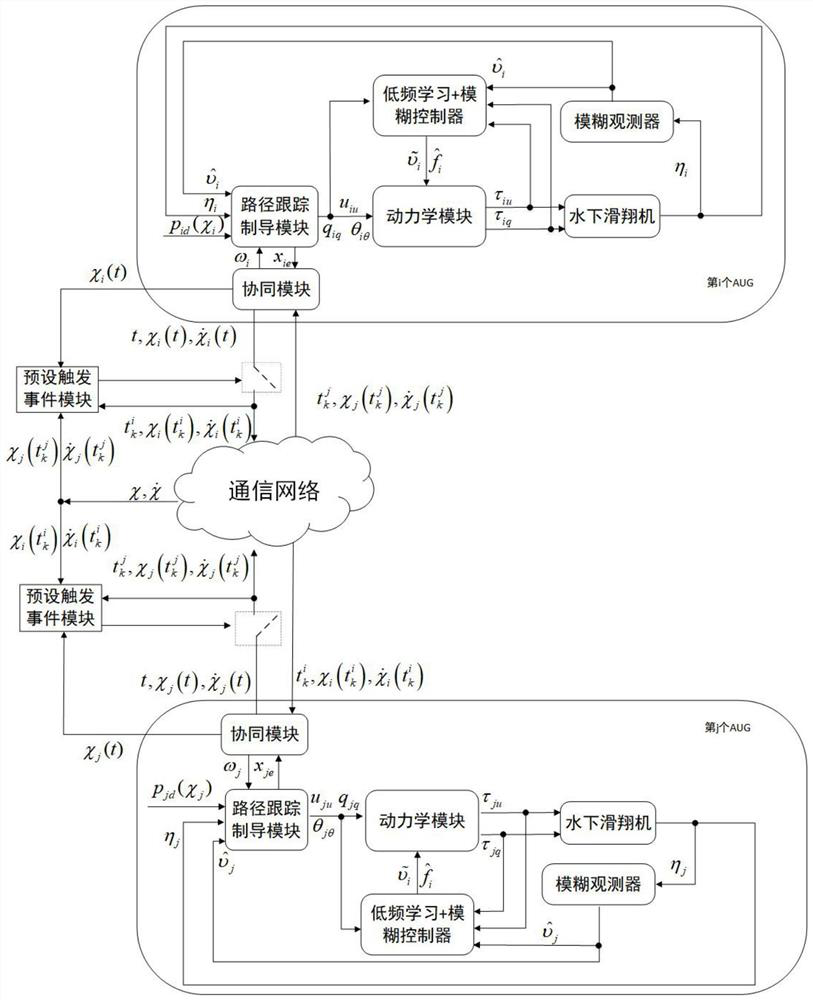
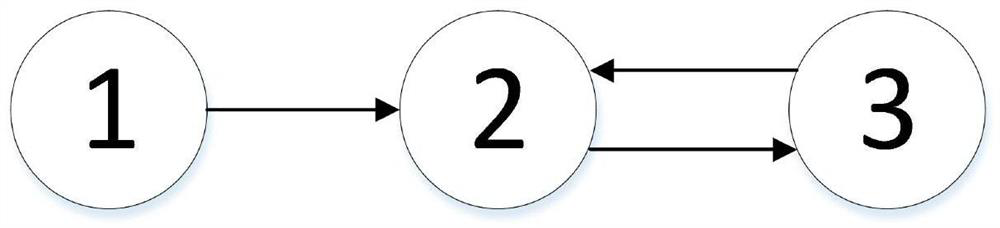
[0071] Below in conjunction with accompanying drawing, the present invention will be further described with a specific coordinated control of three underwater gliders. The structure of the cooperative controller of the aperiodic communication underwater glider designed by the present invention is as follows: figure 1 As shown, the communication network structure of the cooperative control of three underwater gliders is as follows: figure 2 As shown, the path parameter information of No. 1 underwater glider is transmitted to No. 2 underwater glider, the path parameter information of No. 2 underwater glider is transmitted to No. 3 underwater glider, and the parameter information of No. Underwater glider No. 2, that is, underwater glider No. 2, is adjusted in real time through neighbors No. 1 and No. 3.
[0072] The control objective of this embodiment is that the three underwater gliders can track the parameterized path (x id (χ i ),y id (χ i )), and maintain cooperative p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More