

Finite time convergence unmanned ship cooperative controller design method
A technology with limited time and design method, applied in non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problem of not considering the expected effect, communication range limitation, path planning cost increase, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
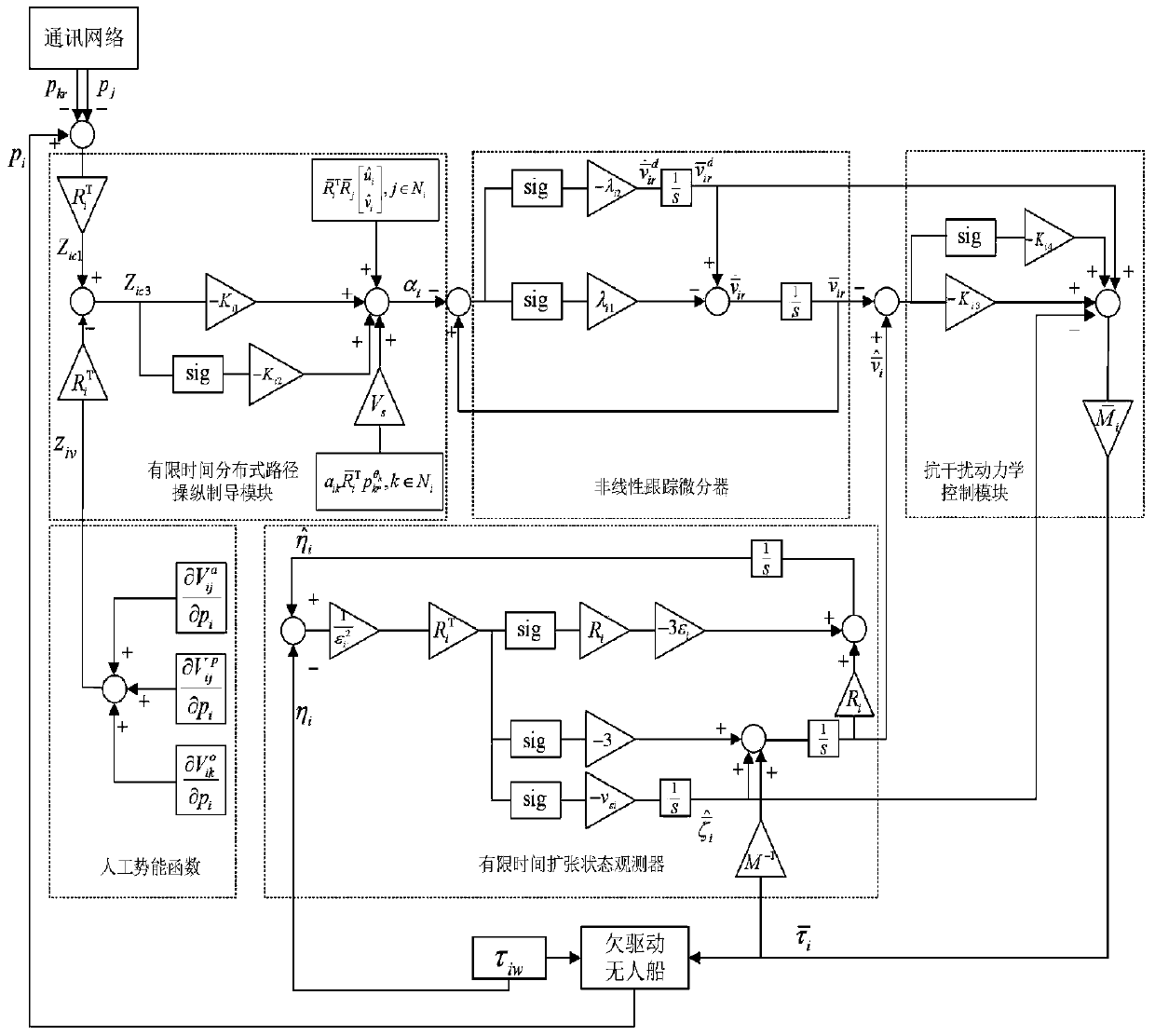
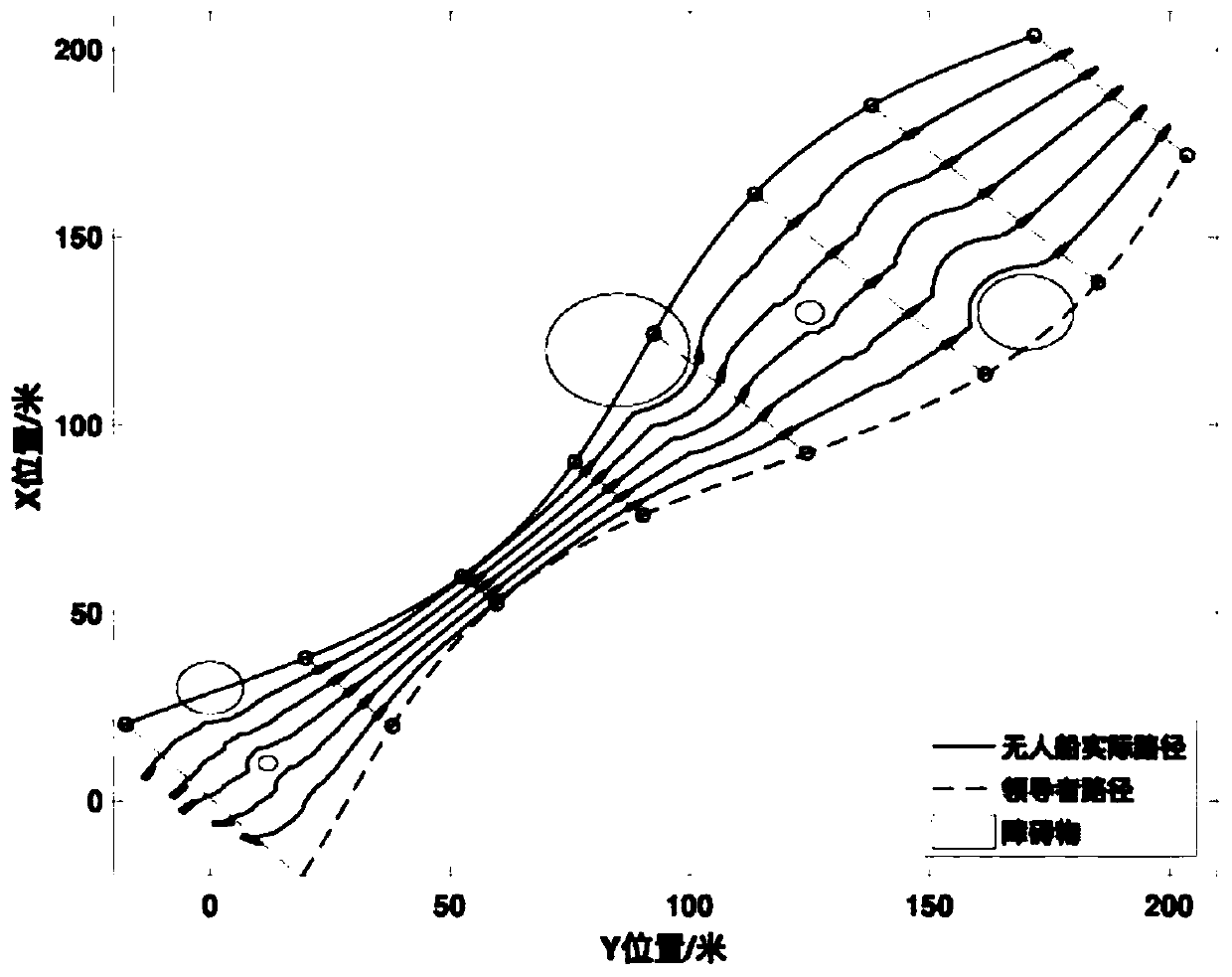
[0061] The present invention will be further described below in conjunction with accompanying drawing. The finite-time convergence underactuated unmanned ship network system design of the present invention is as follows: figure 1 shown. The present invention will be further described below by taking an unmanned ship formation composed of five unmanned ships, two virtual leaders and a super leader as an example. In this embodiment, the unmanned ship formation includes five unmanned ship nodes (numbering 1-5), two virtual leader nodes (numbering 6-7) and a super virtual leader node (numbering 0), wherein, The communication link between the unmanned ship and the virtual leader is undirected, and the number 6 virtual leader can access the information of the super leader. The control objective of this example is that the cooperative maneuvering controller of the unmanned ship formation can realize the distributed path maneuvering control of the underactuated unmanned ship format...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More