

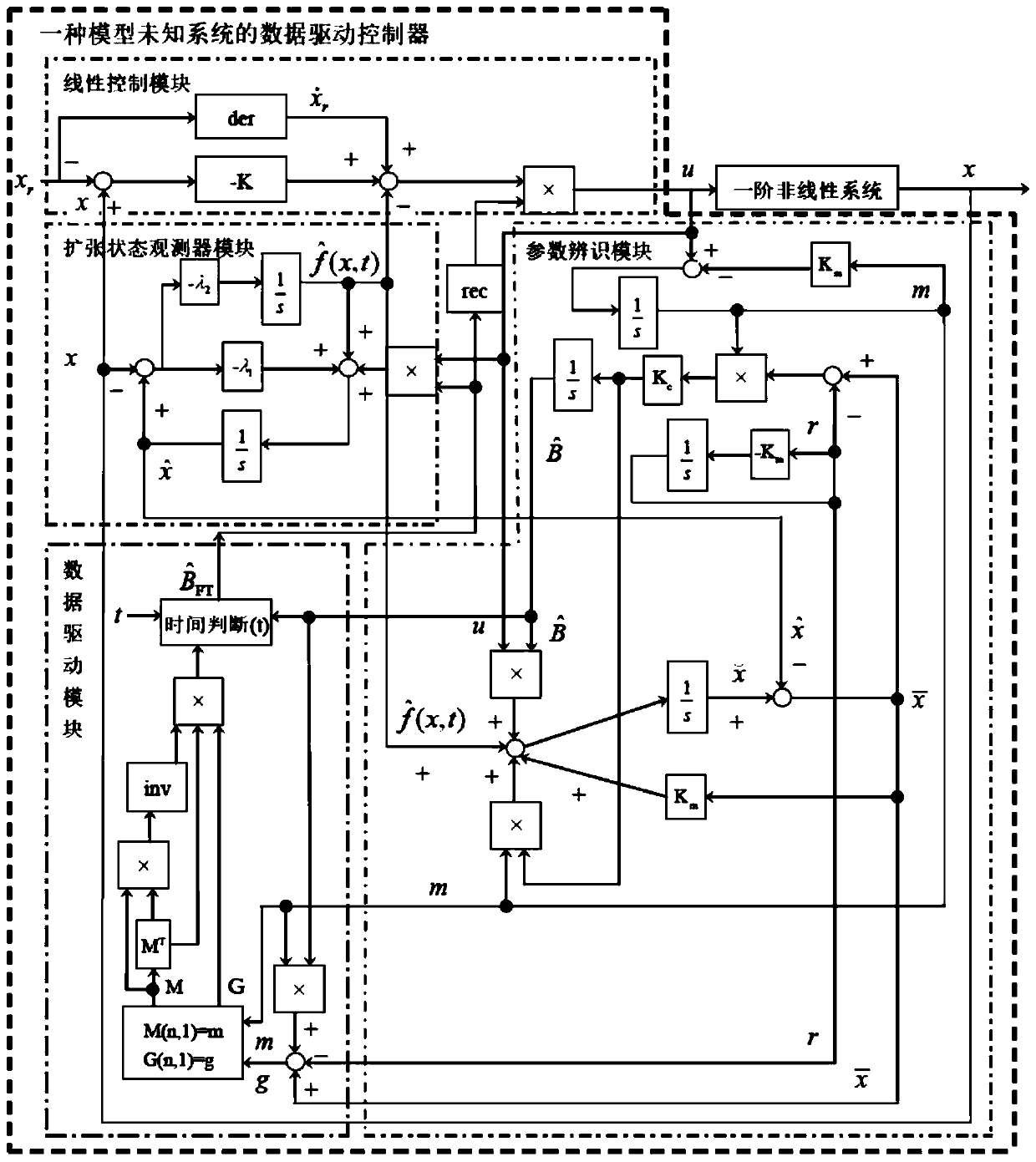
Data driving controller of model unknown system
A data-driven, controller technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., to achieve the effect of improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] Consider the following first-order uncertain nonlinear system
[0052]
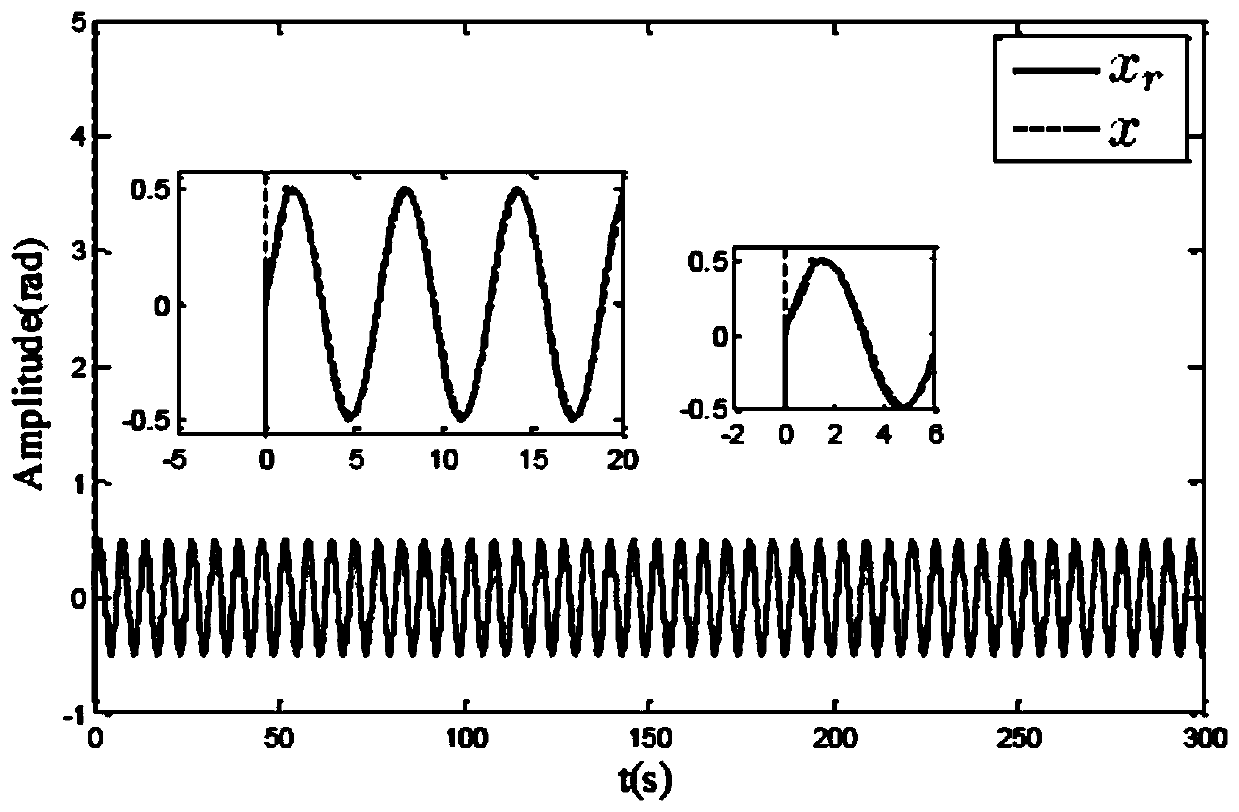
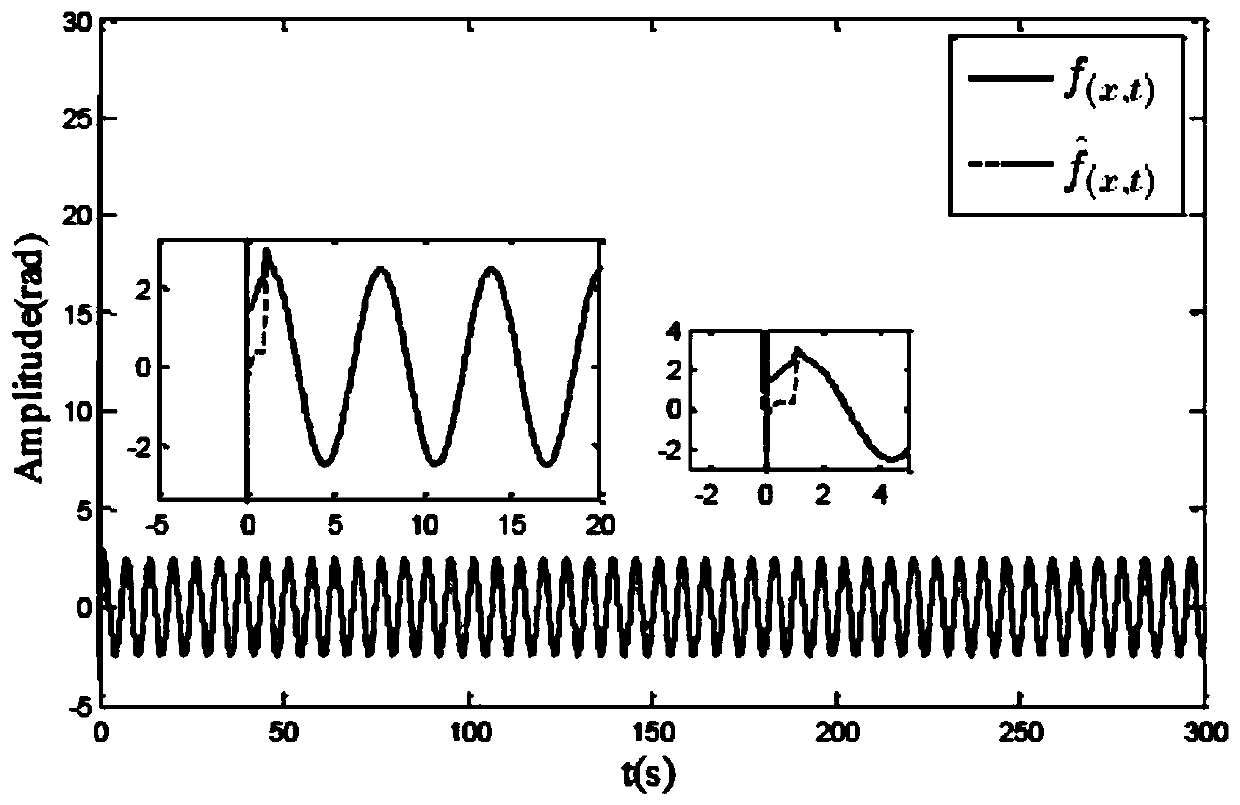
[0053] In the embodiment, uncertain item f(x, t)=5x+cos(t), control parameter B=3, the purpose of system control is to track a sinusoidal signal x r = 0.5 sin(t).
[0054] Select controller parameters: k=5; Extended state observer parameters: λ 1 =60,λ 2 =900; Observer parameters: k m =100,k c =3300.
[0055] Depend on Figure 2~4 It can be seen that the control effect of the controller with unknown control parameters designed by the present invention is better, and the actual output signal x of the controlled system can track the upper reference signal x within 1s r , and the tracking error is small and the accuracy is good. Although the uncertain item f(x,t) of the controlled system is a time-varying item, the extended state observer can accurately estimate it after 1 second, which shows that the controller designed by the present invention has strong robustness. However, the data-driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More