System and method for guiding ultrasound probe
An ultrasound, ultrasonic technology, applied in the field of minimally invasive medical procedures, which can solve problems such as operator difficulties and narrow field of view
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will now be described more fully hereinafter with reference to the accompanying drawings, in which embodiments of the invention are shown. This invention can be embodied in different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided as teaching examples of the invention.
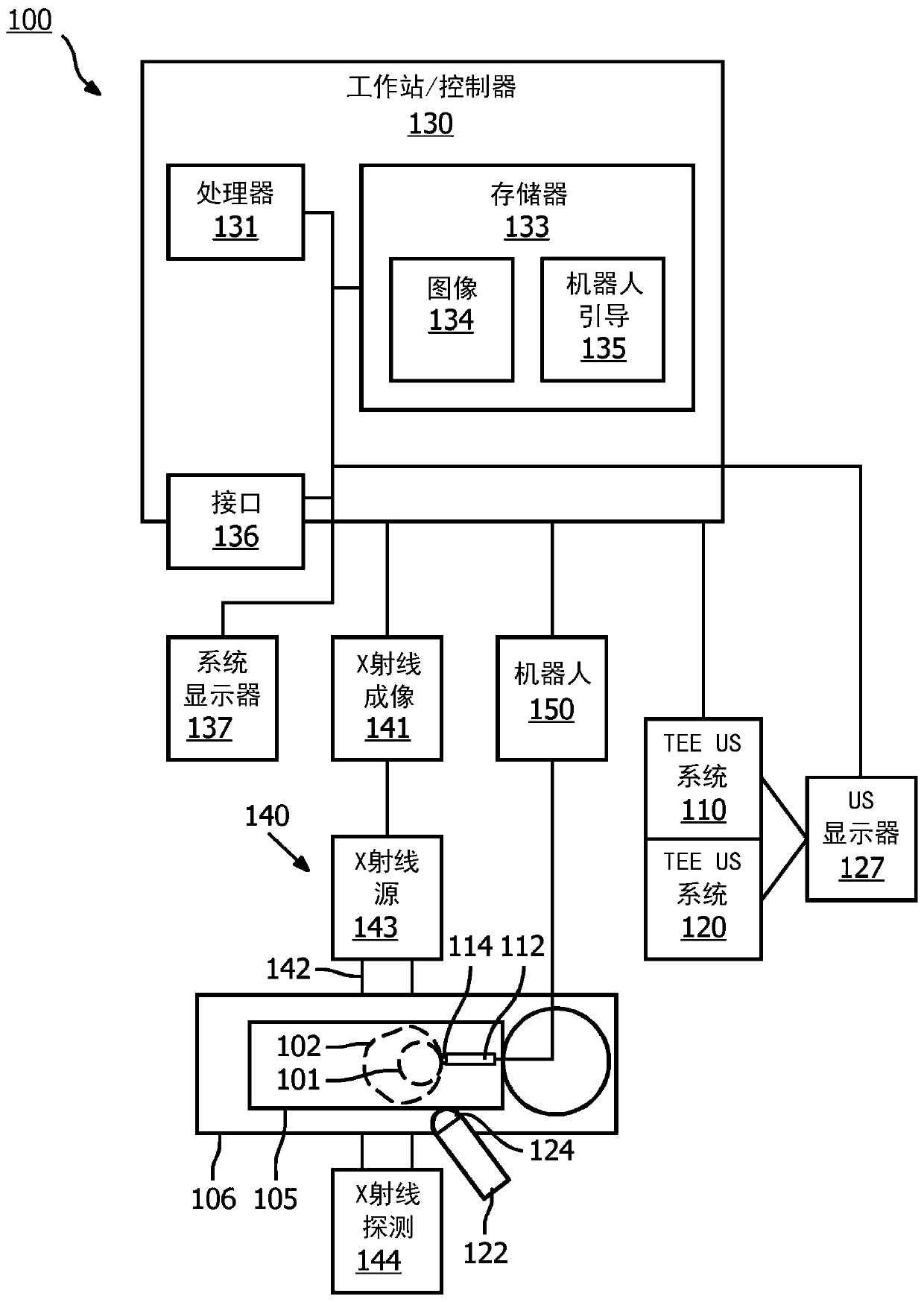
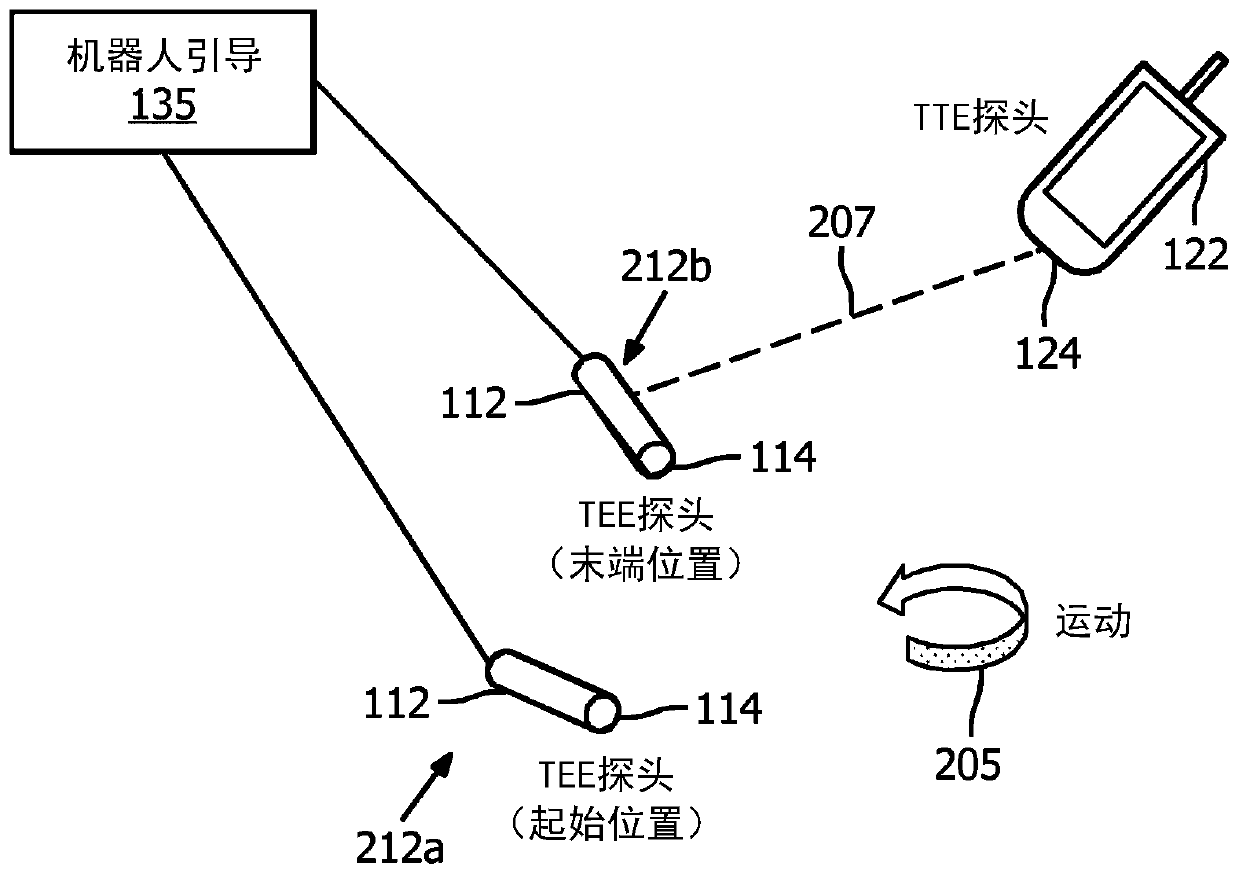
[0016] In general, according to various embodiments, a TEE probe of a TEE ultrasound acquisition system is precisely steered at least in part by a robot using a focused ultrasound beam transmitted by the TTE probe of the TTE ultrasound acquisition system. That is, a user may select a region of interest in a region of the patient's body (eg, heart or other organ) using, for example, the display of the TTE image on a graphical user interface (GUI). Once a region of interest is selected, the TTE probe generates a focused ultrasound beam targeted to the selected region of interest, and the controller uses the foc...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap