

An electromagnetic adsorption wall-climbing robot
A wall-climbing robot and adsorption technology, which is applied in the field of electromagnetic adsorption wall-climbing robots, can solve problems such as falling off, and achieve the effects of saving power consumption, ensuring normal operation, and avoiding excessive energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
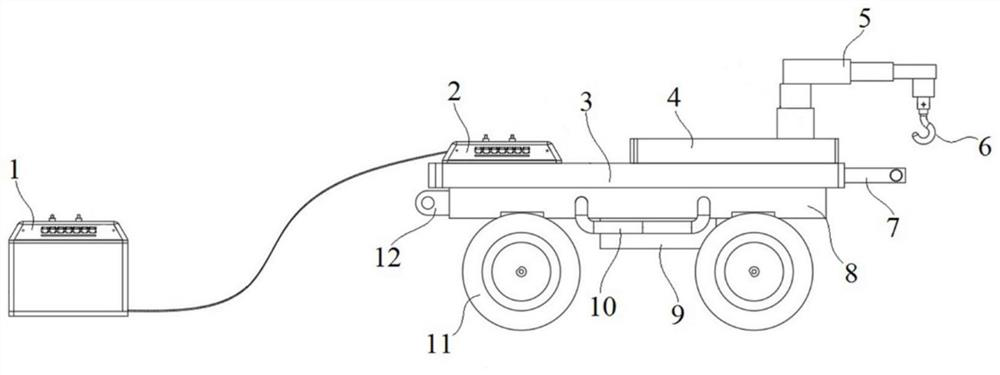
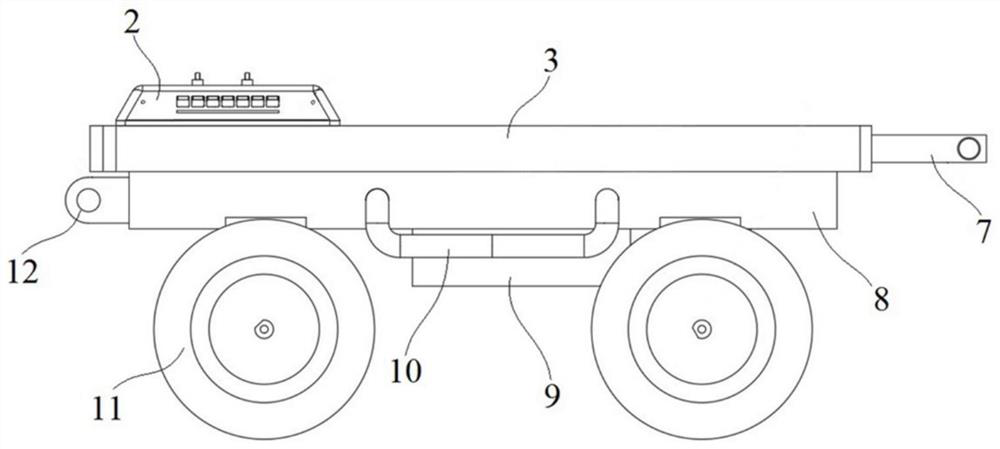
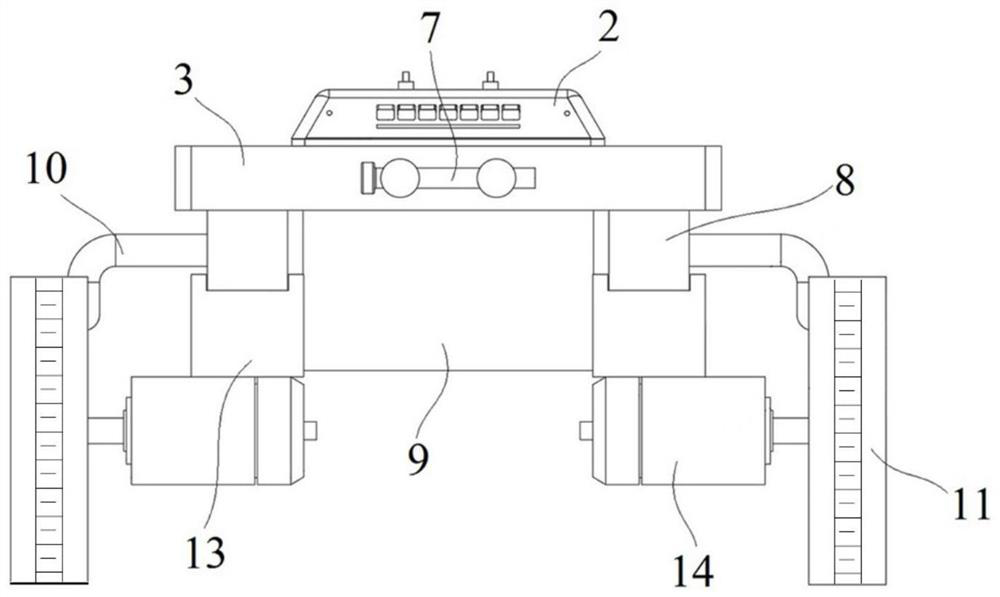
[0027] Such as Figure 1 to Figure 8 Shown is an electromagnetic adsorption wall-climbing robot in a preferred embodiment of the embodiment of the present invention. The electromagnetic adsorption type wall-climbing robot includes a vehicle chassis 3, and both sides of the bottom on the vehicle chassis 3 are provided with fixed pile groups, and the fixed pile groups include a plurality of fixed piles 13 arranged at intervals along the front and rear directions of the vehicle chassis 3 , the bottom of each fixed pile 13 is all fixed with drive motor 14, and the drive shaft of each drive motor 14 is all towards the outside of vehicle chassis 3, and the drive shaft of each d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More