Item delivery methods, robots and media
A technology of robots and objects, which is applied in the field of intelligent robots, can solve problems such as consuming large labor costs, and achieve the effects of saving labor costs, improving user experience, and improving intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
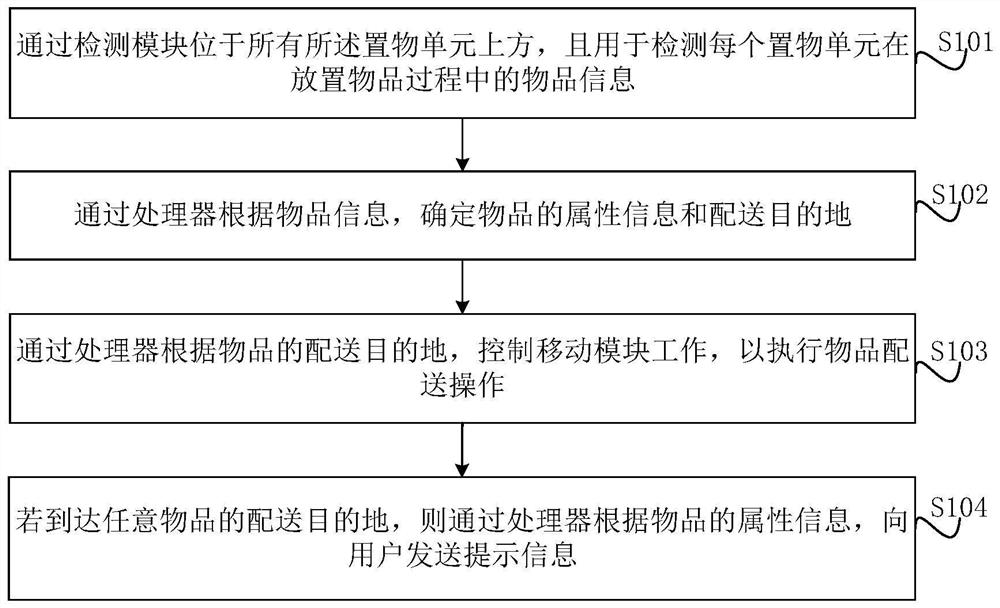
[0031] figure 1 It is a schematic flowchart of an item delivery method provided in Embodiment 1 of the present invention. This embodiment is applicable to the scene where the items delivered by the robot are automatically identified and automatically delivered based on the identification result, and the method may be composed of robot hardware and / or software. In this embodiment, the robot includes: at least one storage unit, a detection module, a processor and a mobile module. like figure 1 As shown, the method specifically includes the following:
[0032] S101, the passing detection module is located above all the storage units, and is used to detect the item information of each storage unit during the process of placing items.
[0033] Among them, placing the detection module above all the storage units can ensure that the detection unit can obtain the information of the front end of each storage unit (item placement area end), and the item information can be but not lim...
Embodiment 2
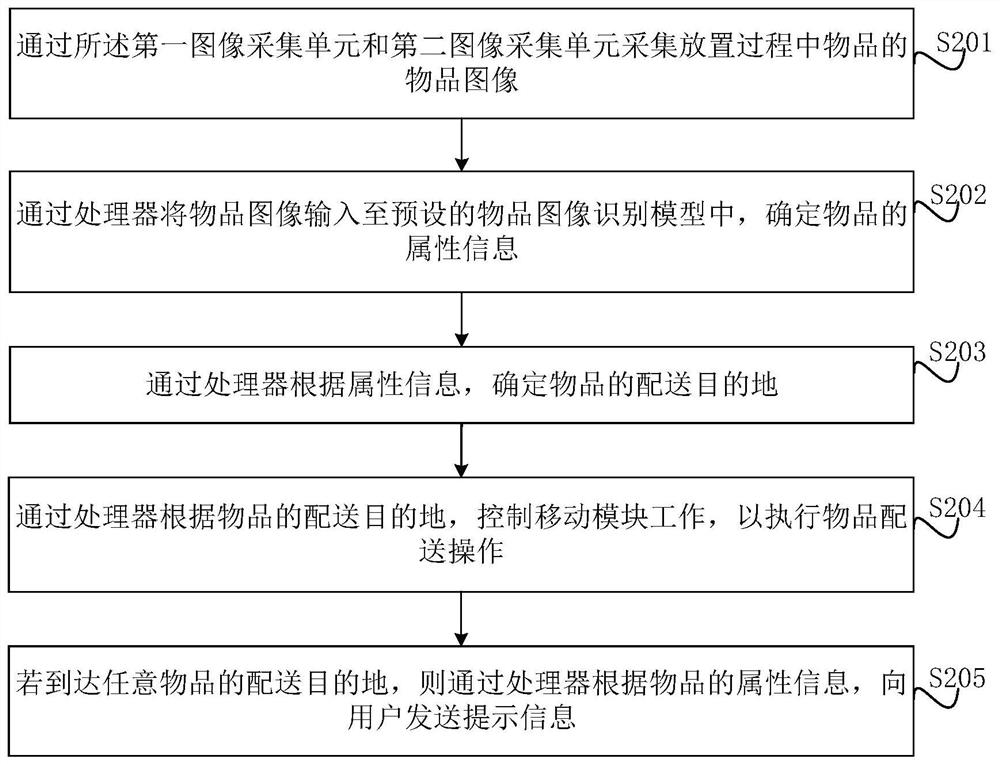
[0081] figure 2 It is a schematic flowchart of an item distribution method provided in Embodiment 2 of the present invention. On the basis of the foregoing embodiments, this embodiment is optimized.
[0082]Specifically, when the detection module includes a first image acquisition unit and a second image acquisition unit, "the detection module detects the item information of each storage unit during the process of placing items" is further optimized. like figure 2 As shown, the method is as follows:
[0083] S201. Use the first image acquisition unit and the second image acquisition unit to acquire an item image of the item during placement.
[0084] During specific implementation, the acquisition area is determined by the first image acquisition unit and the second image acquisition unit, and this area includes the front ends of all storage units. Therefore, when an item is placed into any storage unit, it passes through the front end of the storage unit. It will dynami...
Embodiment 3
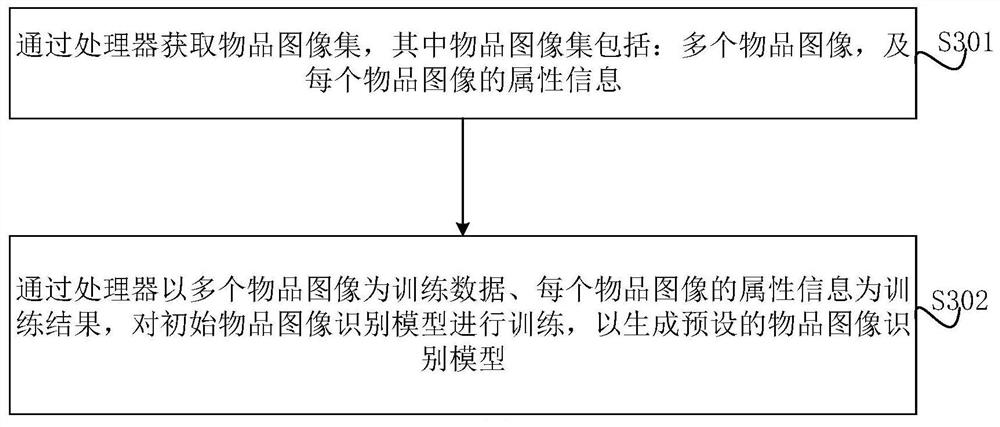
[0114] image 3 It is a schematic flowchart of generating a preset item image recognition model provided by Embodiment 3 of the present invention. like image 3 As shown, the method specifically includes the following steps:
[0115] S301. Obtain an item image set by a processor, wherein the item image set includes: multiple item images, and attribute information of each item image.
[0116] When the robot enters the application scene configuration, the tester operates to make the robot learn items. Optionally, multiple different types of item images can be collected by the image acquisition unit of the detection module, and the multiple different types of item images can be used as an item image set. Then, analyze the attribute information corresponding to each item image, and compose each item image and the attribute information corresponding to each item image into an item image set.
[0117] Further, in order to improve the recognition accuracy of generating the preset...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap