

Robot welding path autonomous planning method based on 3D point cloud data
A technology of robotic welding and point cloud data, applied in welding equipment, manipulators, arc welding equipment, etc., can solve problems such as unavailability of welding paths, inability of robot programs to meet on-site production requirements, inconsistency, etc. The effect of cloud data simplification and workload reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0051] In this embodiment, the workpieces to be welded with straight fillet welds and the workpieces to be welded with arc fillet welds are described:
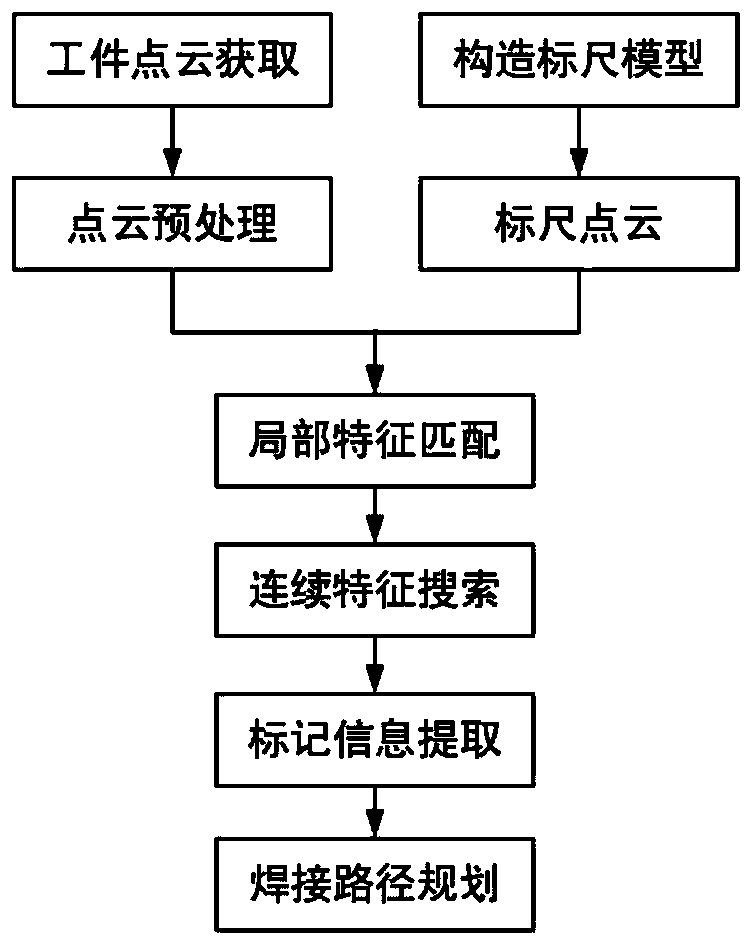
[0052] like figure 1 As shown, a robot welding path autonomous planning method based on 3D point cloud data, including the following steps:
[0053] a. Obtain the original 3D point cloud data of the weld shape of the workpiece, and preprocess the original 3D point cloud data;
[0054] b. According to the weld seam features of the workpiece, build a scale CAD model with the same features, and convert the feature surface information of the scale CAD model into 3D point cloud data;
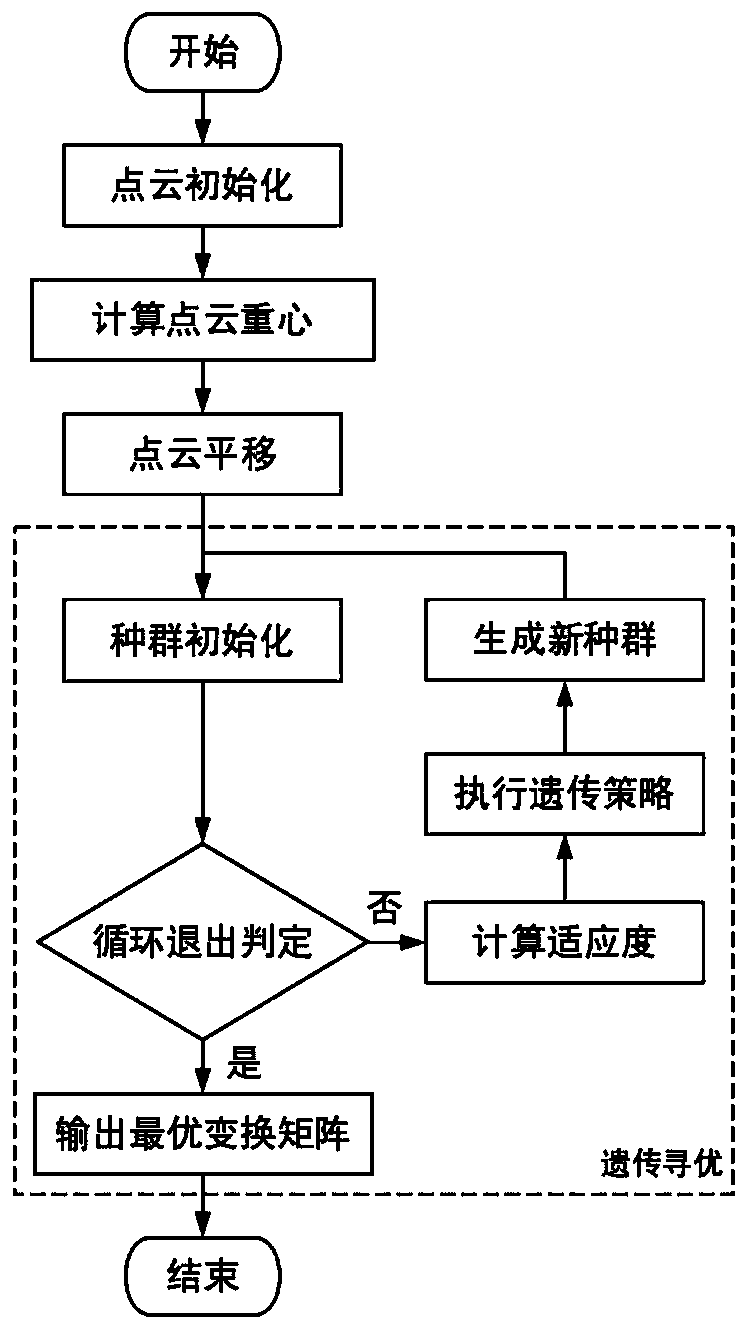
[0055] c. Local registration operation is performed on the 3D point cloud data of the scale CAD model and the 3D point cloud data of the preprocessed workpiece weld shape;
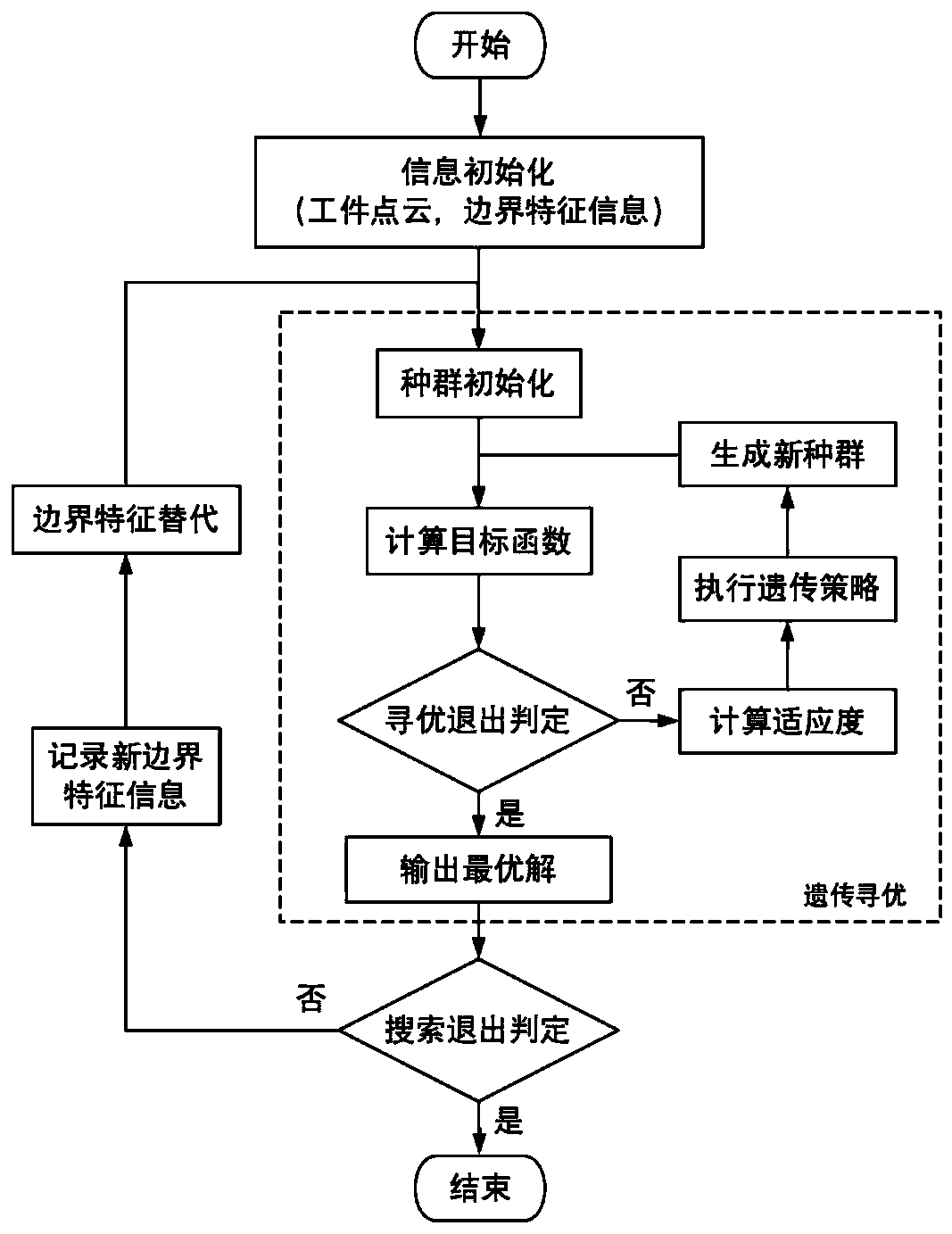
[0056] d. According to the local registration results, continuous feature search is performed to obtain complete workpiece weld information;
[0057] e. Extract the welding po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More