Adaptive compensation PWPF modulation method and device of aircraft RCS
A technology of self-adaptive compensation and modulation method, which is applied in the direction of aerospace vehicle guidance devices, aircraft, aerospace vehicles, etc., and can solve the problems of increased fuel consumption of RCS thrusters and high failure rate of RCS thrusters, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
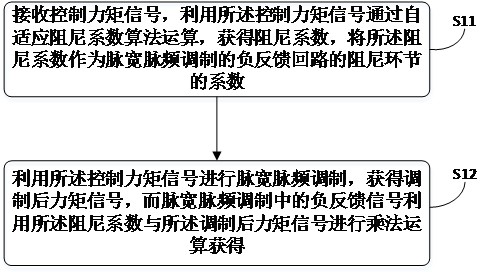
[0052] figure 1 It is a flow chart of an adaptive compensation PWPF modulation method for an aircraft RCS provided in Embodiment 1 of the present invention, and the method includes the following steps:
[0053] Step S11: Receive the control torque signal, use the control torque signal to calculate the adaptive damping coefficient algorithm to obtain the damping coefficient, and use the damping coefficient as the coefficient of the damping link of the negative feedback loop of the pulse width pulse frequency modulation.
[0054] In the embodiment of the present invention, the reaction control system (ReactionControl System, RCS) of the existing hypersonic vehicle often uses a constant value thruster, which needs to rely on PWPF modulation (Pulse-Width Pulse-Frequency, PWPF, pulse width pulse frequency modulation) This means to change the real-time control torque required for attitude control into the "digital" variable thrust of the RCS thruster.
[0055] In the embodiment of...
Embodiment 2
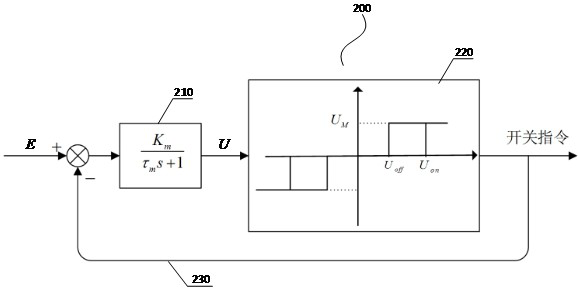
[0077] Figure 5 It is a graph of time and switching times of an adaptive compensation PWPF modulation provided by Embodiment 2 of the present invention.
[0078] Figure 5 The four curves in are the added damping coefficients K 11 , K 12 , K 13 as well as K 14 After the PWPF modulation time vs. switching times curve, the damping coefficient K 11 , K 12 as well as K 13 It is the ratio of the input control torque signal to the RCS rated torque E Do the calculation to get, K 14 It is a fixed value of 0.7. in, K 11 , K 12 as well as K 13 The calculation formulas are:
[0079] ;
[0080] ;
[0081] ;
[0082] In the formula, K 11 , K 12 as well as K 13 is the damping coefficient, E is the ratio of the control torque signal to the RCS rated torque.
[0083] In the embodiment of the present invention, K 11 It can be used as the optimal adaptive damping coefficient, so that the switching times of the adaptive compensation PWPF modulation are l...
Embodiment 3
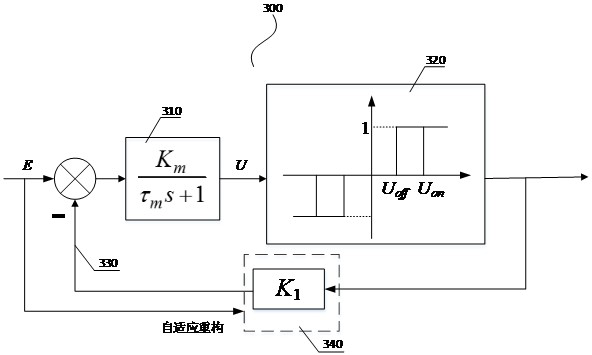
[0087] Figure 7 It is a schematic structural diagram of an adaptive compensation PWPF modulation device for an aircraft RCS provided in Embodiment 3 of the present invention.
[0088] The adaptive compensation PWPF modulation device 700 of the aircraft RCS includes:
[0089] The damping coefficient calculation module 710 is used to receive the control torque signal, use the control torque signal to calculate the damping coefficient through the adaptive damping coefficient algorithm, and use the damping coefficient as the damping link of the negative feedback loop of the pulse width pulse frequency modulation coefficient;
[0090] The torque signal modulation module 720 is configured to use the control torque signal to perform pulse width pulse frequency modulation to obtain a modulated torque signal, and the negative feedback signal in the pulse width pulse frequency modulation uses the damping coefficient and the modulated torque signal Obtained by multiplication.
[0091...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More