Improved ladrc linear active disturbance rejection control system and parameter tuning method
A linear active disturbance rejection and active disturbance rejection controller technology, applied in the field of automation, can solve the problems of unknown and time-varying control variable gain b, difficulty in obtaining control object parameters, etc., so as to avoid parameter meanings and debugging process being unclear, process simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
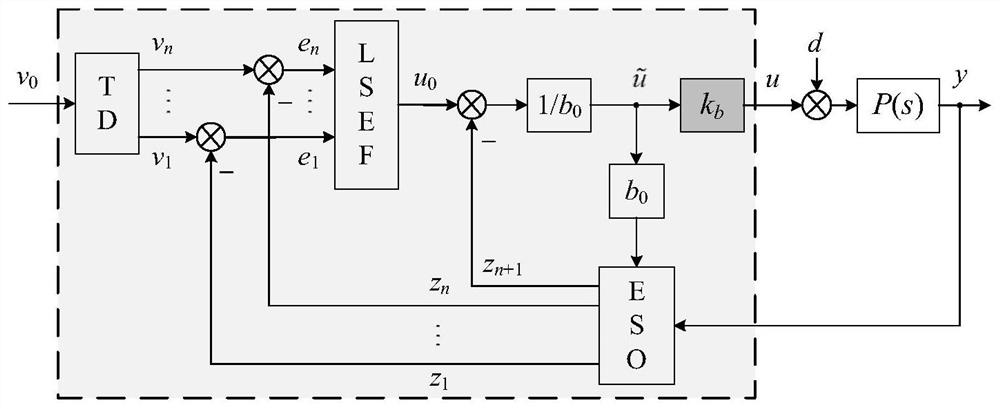
[0058] A kind of improved LADRC linear active disturbance rejection control system of the present embodiment, such as figure 1 As shown, including the controlled object and the ADRC controller, the ADRC controller includes a tracking differentiator, an extended state observer and a linear error feedback control law;
[0059] The input to the tracking differentiator is v 0 , the output is v i , i=1,2,...,n;
[0060] The output of the extended state observer is z i , i=1, 2, ..., n, n+1;
[0061] Track the output v of the differentiator i , i=1, 2,..., n and the output z of the extended state observer i , i=1, 2,..., n is used as the input e of the linear error feedback control law after subtraction and comparison i , i=1,2,...,n;
[0062] The output u of the linear error feedback control law 0 and the output z of the extended state observer i , i=n+1, 1 / b after subtraction comparison 0 Multiplier gain, to get the intermediate control amount The intermediate control ...
Embodiment 2
[0080] Based on the improved LADRC linear active disturbance rejection control system in Embodiment 1, its parameter setting method includes the following specific steps:
[0081] 1) Perform control logic configuration on the control system of the controlled object based on the ADRC; the control system of the controlled object in this step includes a DCS control system, a PID control system or a control system composed of other microprocessor chips .
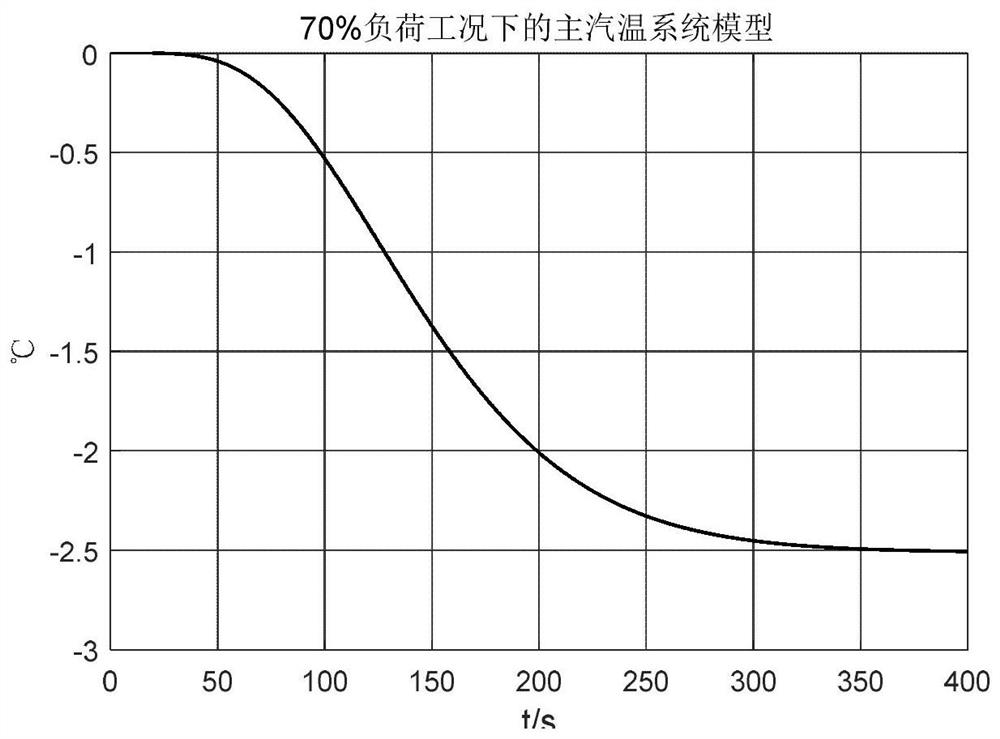
[0082] 2) On-site use the soaring curve method to obtain the steady-state gain K of the controlled object, the time parameter T of the approximate n-order inertial or pure delay system, and the open-loop adjustment time t s1 .
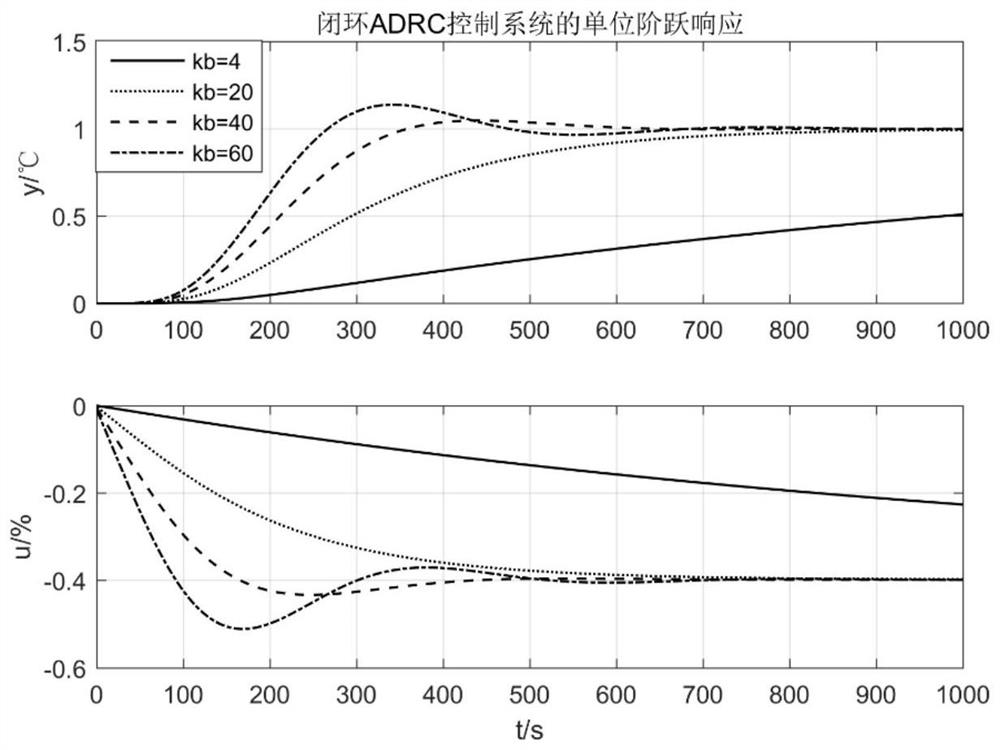
[0083] 3) Set the control variable gain b of the controlled object in the control logic configuration 0 The initial value of , the bandwidth ω of the expanded state observer o The initial value of , the bandwidth ω of the error feedback control law c The initial value of and the fine-tuning compensat...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap