

PID control system and parameter setting method
A control system and parameter tuning technology, applied in electric controllers, controllers with specific characteristics, etc., can solve problems such as time-consuming and labor-intensive
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
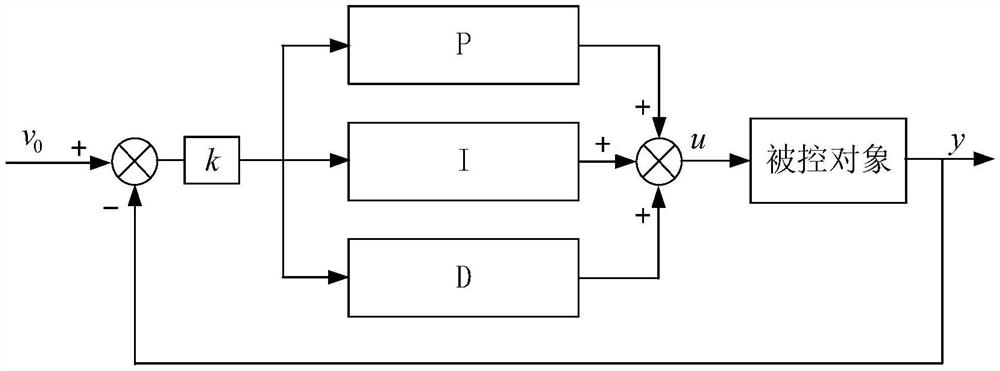
[0063] A PID control system in this example, such as figure 1 with figure 2 As shown, it includes the controlled object and the PID controller. The PID controller includes a proportional unit P, an integral unit I, a differential unit D and a controller gain coefficient k. The transfer function of the PID controller is:
[0064]
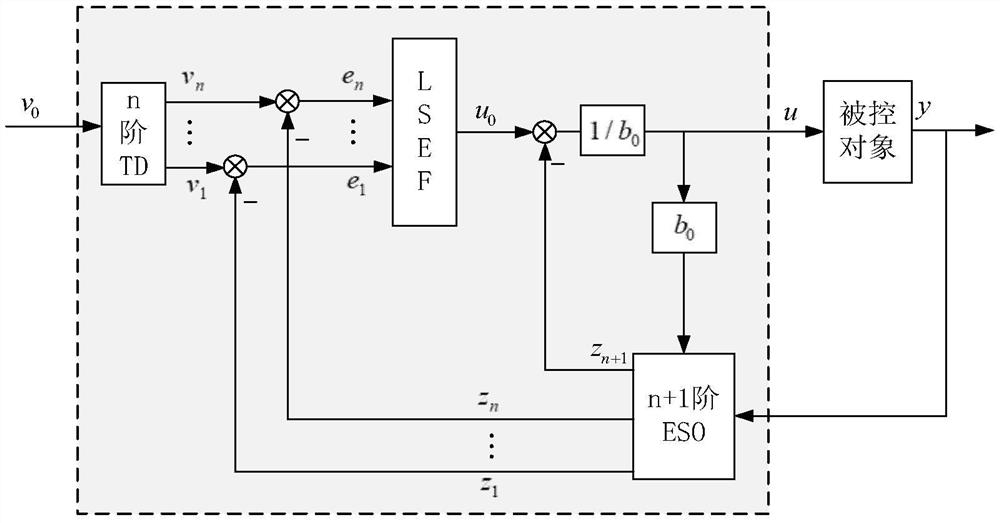
[0065] The PID controller is inspired by the linear active disturbance rejection controller, and the transfer function inspired by the PID controller is:
[0066]
[0067] The relationship between the parameters of the PID controller and the parameters inspired by the linear active disturbance rejection controller LADRC is as follows:
[0068]
[0069] Among them, k p is the proportional coefficient; T i is the integration time; k d is the differential coefficient; T d is the differential time; k is the controller gain coefficient; ω 0 is the bandwidth of the extended state observer LESO in the linear active disturbance rejection cont...
Embodiment 2
[0108] This example provides the parameter tuning method of the above PID control system, such as Figure 14 shown, including the following specific steps:
[0109] 1) Perform control algorithm configuration on the control system of the controlled object based on the PID controller; in step 1), the control system of the controlled object includes a DCS control system and a PLC control system.
[0110] 2) Obtain the soaring curve of the controlled object on site, and obtain the steady-state gain K of the controlled object, the time parameter T and the delay time τ of the approximate first-order or second-order inertia plus pure delay system, and the open-loop adjustment time t s1 ;
[0111] 3) Let the PID controller bandwidth ω c The filter parameter ω of the PID controller with the desired closed-loop 0 The ratio of is λ, then k p =2ξλ-λ 2 , k d =(1-2ξλ+λ 2 ); based on the lift curve, set λ, ξ, ω c , the initial value of k, according to the set initial value, calcu...
Embodiment 3
[0126] This embodiment adopts the control system and parameter setting method of the present invention to automatically control the main steam temperature control system of a 330MW circulating fluidized bed unit. The main steam temperature system model of the unit is as follows
[0127]
[0128] Among them, P 1 (s) is the leading region model (°C / %), P 2 (s) is the inert zone model (°C / °C), and the unit step response curve after the two are connected in series is as follows Figure 4 shown.
[0129] The system approximates the FOPTD model as follows:
[0130]
[0131] Parameter tuning methods include:
[0132] Step 1, based on the PID controller of the present invention, the control algorithm configuration is carried out on the control system of the controlled object, such as image 3 shown;
[0133] Step 2: Use the soaring curve method on site to obtain the steady-state gain K of the controlled object, the time parameters T and τ of the approximate first-order iner...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More