Improved first-order linear active disturbance rejection control system and parameter setting method thereof
A linear active disturbance rejection and active disturbance rejection controller technology, applied in the field of automation, can solve problems such as poor control of second-order underdamped objects, avoid parameter meanings and unclear debugging processes, meet debugging habits, and clarify debugging rules and physical effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
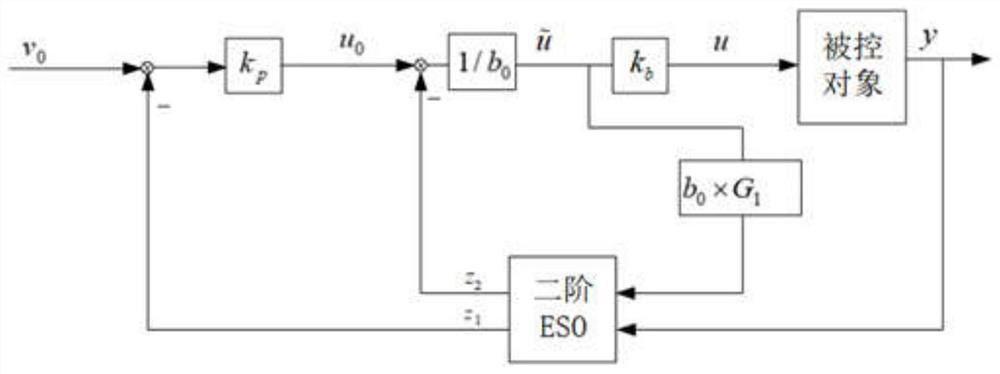
[0055] An improved first-order linear active disturbance rejection control system of this embodiment, such as figure 1 As shown, including the controlled object and the ADRC controller, the ADRC controller includes an extended state observer and a linear error feedback control law, and the output of the extended state observer is z i , i=1, 2;
[0056] set value v 0 and the output z of the extended state observer 1 After doing the subtraction comparison, it is used as the input of the linear error feedback control law;
[0057] The output u of the linear error feedback control law 0 and the output z of the extended state observer 2 , after doing the subtraction comparison by 1 / b 0 Multiplier gain, to get the intermediate control amount The intermediate control Divide into two roads, one road passes through b 0 ×G 1 The multiplication gain is used as the first input signal of the extended state observer; the other path passes through k b After multiplying the gain,...
Embodiment 2
[0060] The further design of this embodiment is: in this example, the controlled object is a linear object with second-order underdamped delay, and the expression is:
[0061]
[0062] in, ξ<1
[0063] Assume but
[0064] In the formula, y is the output of the controlled object; u is the input of the controlled object; T is the inertia time constant of the controlled object, ξ is the damping coefficient of the controlled object, ξn is the oscillation frequency of the controlled object, τ is the delay time of the controlled object, b is the controlled variable gain of the controlled object; b 0 is the coarse adjustment compensation factor of the control volume gain; is the intermediate control quantity, is the modified object transfer function.
Embodiment 3
[0066] The further design of this embodiment is: in this example, the extended state observer is a second-order extended state observer, and for the modified object transfer function Construct an extended state observer, the expression is:
[0067]
[0068] in ω o is the bandwidth of the extended state observer, and ζ is the damping coefficient of the extended state observer.
[0069] In the formula, z i is the output of the extended state observer, i=1, 2; β i is the parameter of the extended state observer, i=1, 2, β 1 = 2ζω 0 ,
[0070] The compensation reference model above G 1 is a first-order inertial system or a second-order inertial system;
[0071] If G 1 is a first-order inertial system, T 1 To compensate the time parameter of the reference model, T 1 = a / ω c , ω c is the bandwidth of the linear error feedback control law, and the value range of a is [0.5,2]. Preferably a=1.
[0072] If G 1 is a second-order inertial system, T 1 To compens...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap