Lower limb artificial limb knee joint capable of combining active type and passive type
A knee joint, active and passive technology, applied in prosthetics, medical science, artificial legs, etc., can solve the problems of restricting the activities of prosthetic users, heavy weight and large size of mainstream prosthetics, and achieve smooth walking, comfortable use, and good The effect of damping properties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
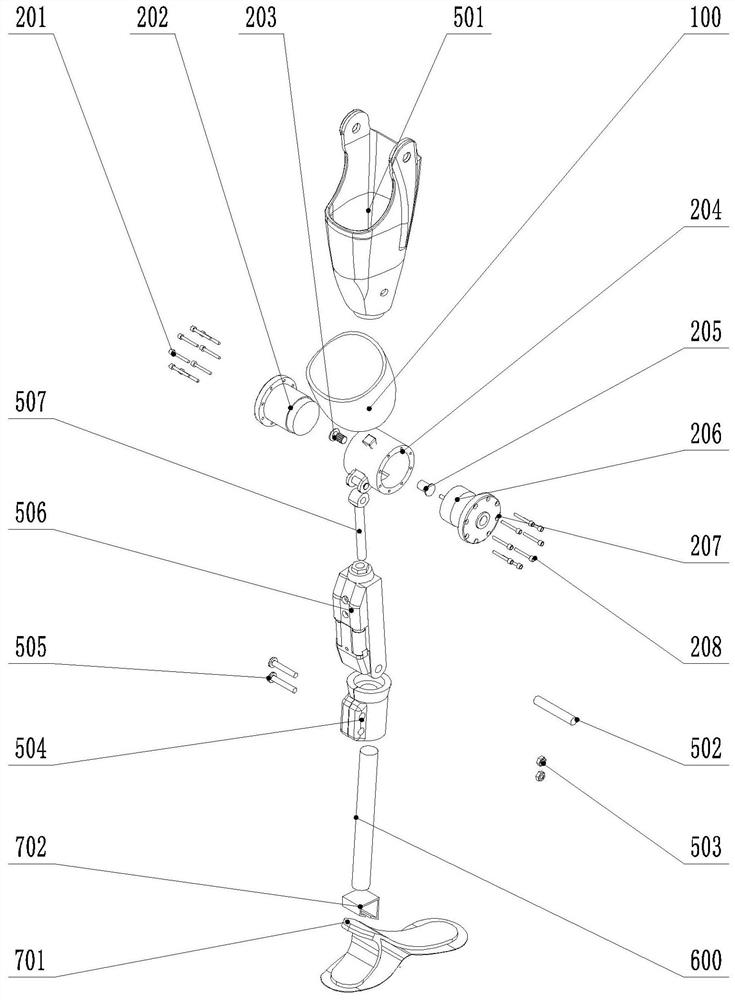
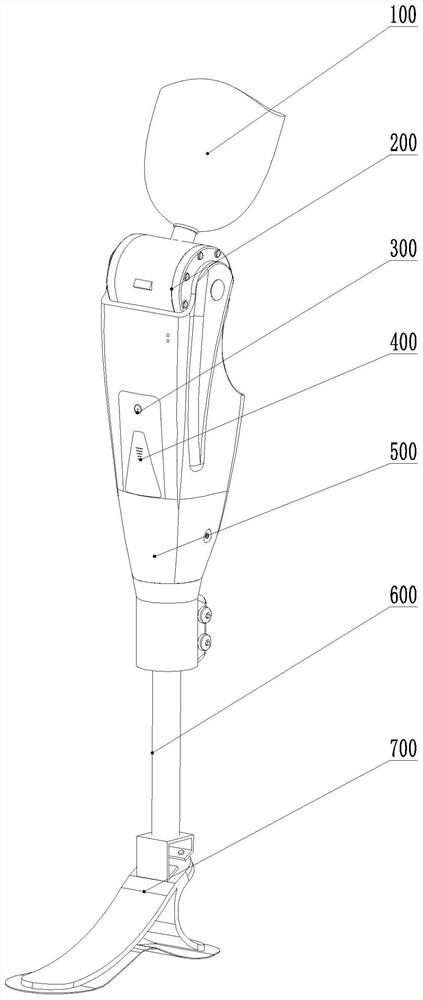
[0023] Specific implementation mode one: as figure 2 , Figure 4-Figure 7 As shown, this embodiment discloses an active-passive combined lower limb prosthetic knee joint, including a receiving cavity 100, a rotating joint shaft 200, a control panel 300, a Bluetooth communication module 400, a dynamic knee joint 500, a calf rod 600 and carbon fiber Energy storage feet 700;
[0024] The lower end of the receiving cavity 100 is fixedly connected with the upper end of the rotating joint shaft 200, and the rotating joint shaft 200 is fixedly connected with the dynamic knee joint 500. The lower end of the joint 500 is fixedly connected, and the lower end of the calf rod 600 is fixedly connected with the upper end of the carbon fiber energy storage foot 700. A control panel 300 and a Bluetooth communication module 400 are fixed on the outer wall of the dynamic knee joint 500. The control panel 300 is used to control the rotation of the joint The motor 206 of the shaft 200 is start...
specific Embodiment approach 2
[0025] Specific implementation mode two: as Figure 1-Figure 6 As shown, this embodiment is a further description of Embodiment 1. The rotary joint shaft 200 includes a reducer 202, a spline shaft 203, a hollow joint shaft 204, a bearing end cover 205, a motor 206, a right end cover 207, Mechanical adapter 209 and angle sensor 210;
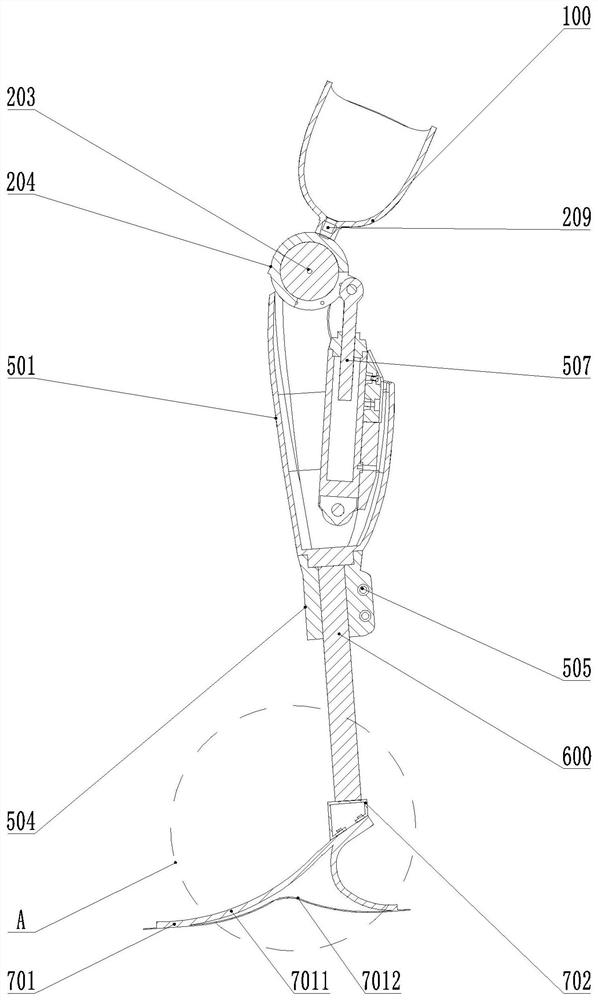
[0026] The hollow joint shaft 204 is arranged horizontally, and the upper end of the outer wall of the hollow joint shaft 204 is fixedly connected to the lower end of the receiving cavity 100 through a mechanical adapter 209. The left end inside, the motor 206 and the right end cover 207 (using the right end cover fixing screw 208) are axially fixed on the right end of the hollow joint shaft 204, the angle sensor 210 is fixed on the right side of the motor 206, and the output shaft of the motor 206 It is connected with the input shaft of the reducer 202, and the outer end surface of the output shaft of the reducer 202 is provided with a spline ho...
specific Embodiment approach 3
[0027] Specific implementation mode three: as Figure 1-Figure 6 As shown, this embodiment is a further description of Embodiment 1. The dynamic knee joint 500 includes a calf housing 501, a long shaft 502, a calf connection sleeve 504, a damping cylinder 506, and a guide rod 507;
[0028] The upper end of the guide rod 507 is rotatably connected to the outer wall of the hollow joint shaft 204, and the lower end of the guide rod 507 is connected to the upper end of the piston rod of the damping cylinder 506. The long axis 502 is connected to the lower side wall of the lower leg housing 501;
[0029] The shank connecting sleeve 504 is two symmetrical split structures, the upper end of the shank connecting sleeve 504 is slidably connected with the lower end of the shank shell 501 (the lower end of the shank shell 501 is provided with two slideways in parallel, the upper end of the shank connecting sleeve 504 is connected to the two The upper end of the calf rod 600 is set in th...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap