

Vision measurement system and method based on combination of global feature and local feature
A technology of global features and local features, applied in the field of position and attitude calculation of non-cooperative satellite targets, can solve problems such as difficult to cover and provide high-precision data, unable to output measurement data, and unable to meet the needs of non-cooperative target measurement, etc. Achieve the effects of eliminating errors and errors, improving accuracy and stability, and increasing the range of activities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
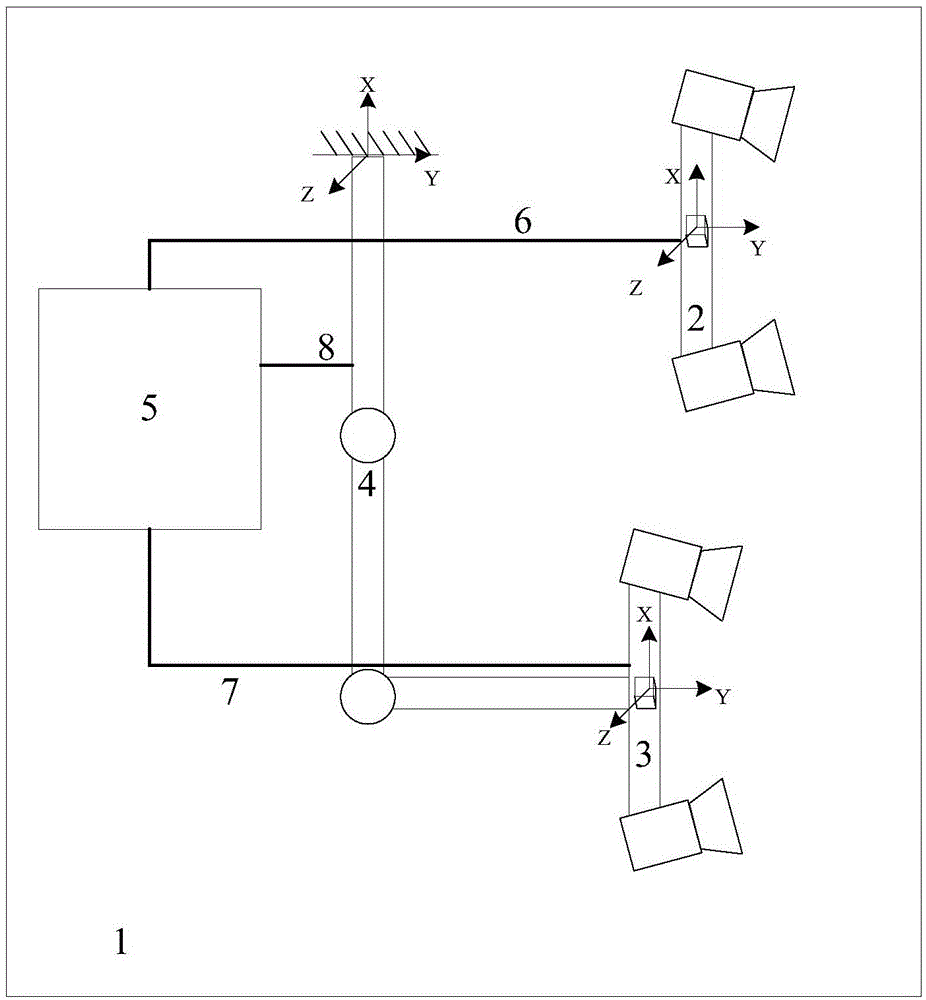
[0029] Such as figure 1 As shown, the platform binocular camera 2 is installed on the fixed position of the satellite body 1; the mechanical arm hand-eye camera 3 is installed on the front end of the mechanical arm 4, and the mechanical arm hand-eye camera 3 is fixed on the fixed position of the satellite body when the mechanical arm 4 is not deployed; The root of the mechanical arm 4 is installed on the fixed position of the satellite body 1 . The diffuse reflection cooperation target mark point is pasted on the back end of the hand-eye camera 3 of the robotic arm. The onboard computer 5 is installed on the satellite body 1 and can control the movement of the satellite body 1 itself. The on-board computer 5 is connected with the platform binocular camera 2 and the hand-eye camera 3 of the robot arm through electronic circuits 6 and 7;
[0030] Calibrate the positions of the platform binocular camera 2, the robotic arm 4, and the robotic arm hand-eye camera 3 in the mutual c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More