

Splicing point multi-branch path planning method and system of virtual bronchoscope
A technology of path planning and bronchoscopy, applied in the field of multi-branch path planning at splicing points, can solve the problems of lack of single-branch path planning method, complex multi-branch, disorder, etc.
Pending Publication Date: 2021-04-02
济南国科医工科技发展有限公司
View PDF0 Cites 2 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0007] Due to the increasingly widespread application of virtual endoscopy, organs with multi-branch lumen structures such as lung bronchi have the same demand for virtual endoscopy technology. After refining the centerline of the entire bronchial tree, Unable to solve the problem of complex multi-branch path planning
[0008] The bronchial tree has a complex and multi-branched structure. After obtaining a complete centerline image of the bronchial tree using the topology refinement method, the coordinates of the centerline obtained along the height direction, that is, the Z-axis direction, are relatively disordered. The path of automatic roaming should be based on the actual It needs to be specific to a certain branch, and there is currently no path planning method for screening out a single branch
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
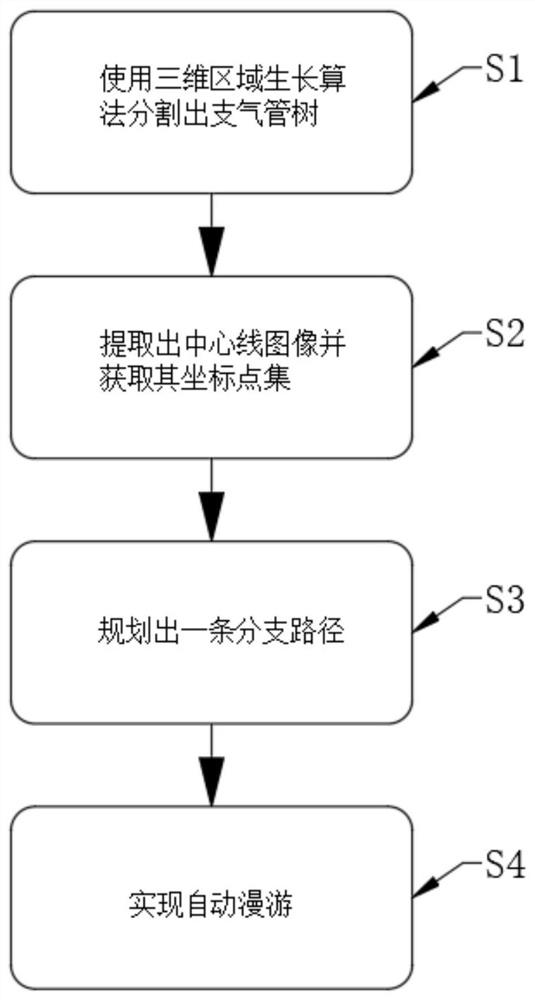
[0042] Such as Figure 1-3 As shown, the object of the present invention is to provide a multi-branch path planning method for a splicing point of a virtual bronchoscope, comprising the following steps:
[0043] S1. Segment the bronchial tree using a three-dimensional region growing algorithm on the acquired CT sequence images of the lungs;
[0044] S2. Using a three-dimensional thinning algorithm to extract the centerline image and obtain its coordinate point set from the segmented bronchial tree image;
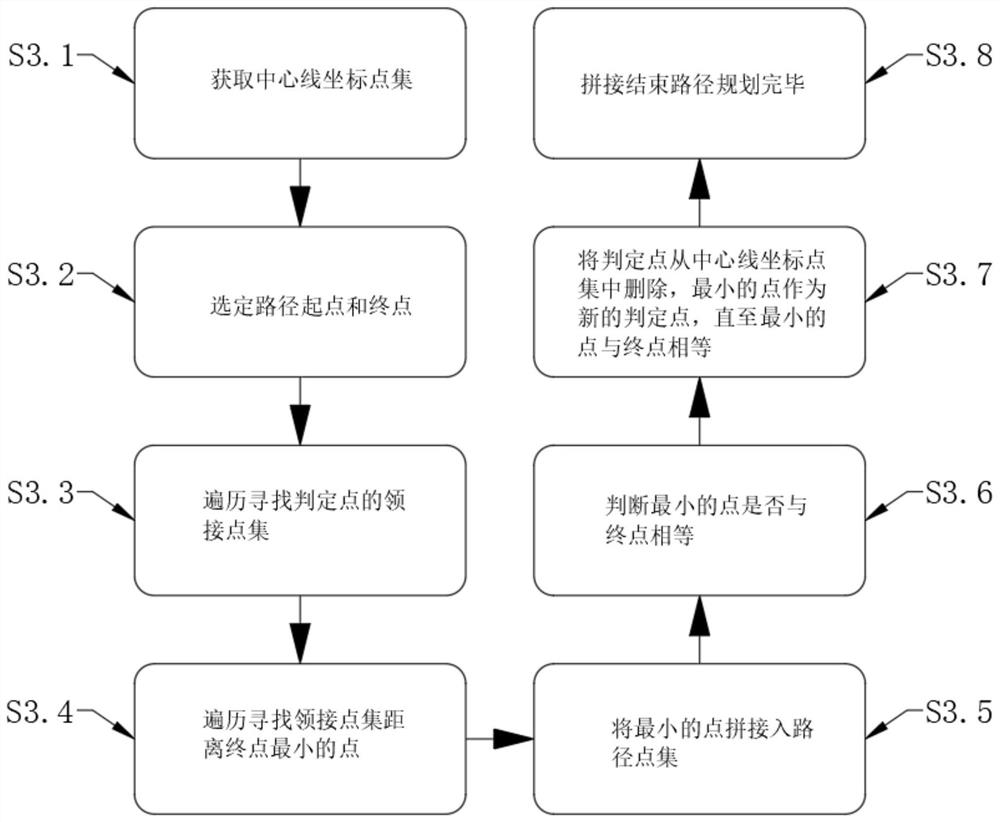
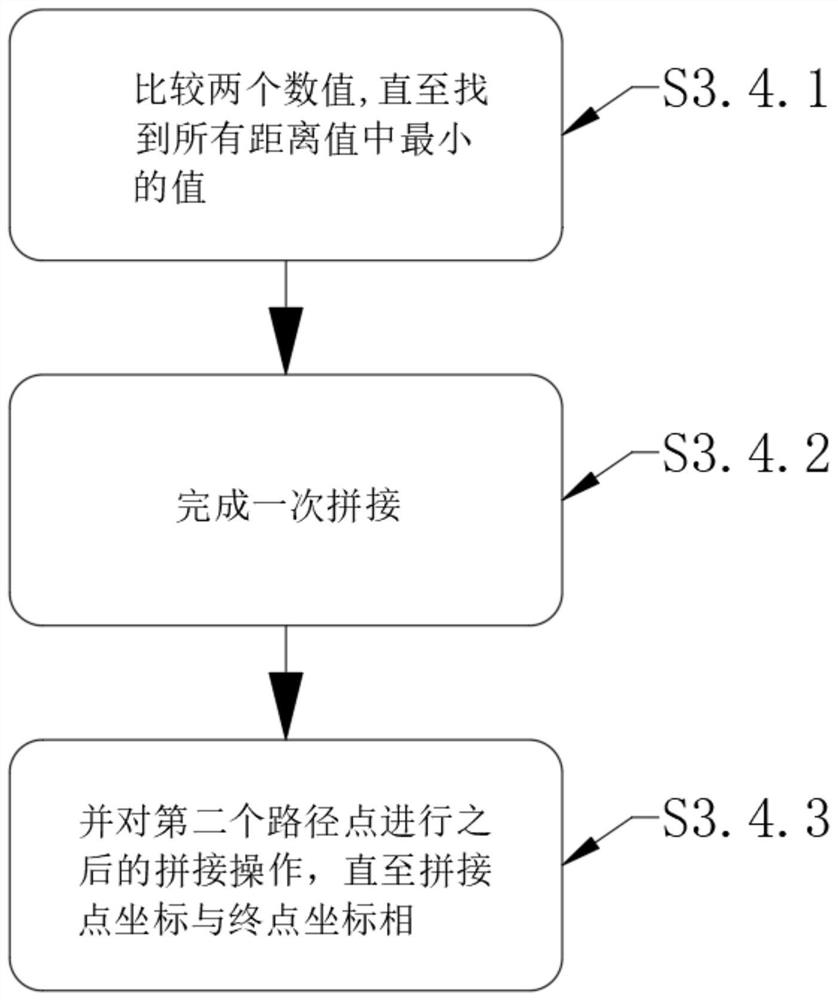
[0045] S3, using the splicing point algorithm to plan a branch path among the complex multiple branch paths of the centerline of the bronchial tree;
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention relates to the technical field of splicing point multi-branch path planning, in particular to a splicing point multi-branch path planning method of a virtual bronchoscope, which comprises the following step of segmenting a bronchus tree from an acquired lung CT sequence image by using a three-dimensional region growth algorithm. According to the splicing point multi-branch path planning method and system for the virtual bronchoscope, the planning effect of complex multi-branch paths and large-curvature turning branch paths can be achieved through a splicing point path planning algorithm, and a high-quality center line image meeting the requirements for centrality, connectivity and singleness of a center path can be obtained; the methhod is an important premise for planning the bronchial tree path by using a splicing point algorithm, can solve the problem of multi-branch path planning of automatic roaming of the virtual bronchoscope, adopts the splicing point branch path planning algorithm, and can quickly and conveniently plan an automatic roaming path reaching any branch end point after obtaining the complete center line of the bronchial tree.
Description
technical field [0001] The present invention relates to the technical field of multi-branch path planning at a splicing point, in particular to a method and system for planning a multi-branch path at a splicing point of a virtual bronchoscope. Background technique [0002] Virtual endoscopy is a new non-invasive diagnostic method that uses computers to process 3D medical images such as CT and MRI to generate a 3D dynamic view of specific anatomical structures inside the human body to simulate the inspection process and visual effects of a standard endoscope , it has unique advantages such as non-invasiveness, repeated use, dynamic pathological analysis, no inspection dead zone, etc., and has broad application prospects. For this reason, many countries and research institutions have invested a lot of manpower and material resources in research. [0003] Virtual bronchoscopy uses the characteristics of high-resolution CT of the lungs to perform three-dimensional reconstruction...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G06T7/00G06T7/11G06T7/73
CPCG06T7/0012G06T7/11G06T7/73G06T2207/10068G06T2207/10081G06T2207/30061G06T2207/30244
Inventor吴文彬夏威高欣
Owner济南国科医工科技发展有限公司