

Inertial navigation precision compensation method of local polynomial model considering frequency domain characteristics
A technology of polynomial model and frequency domain characteristics, applied in the field of perturbed gravity calculation, can solve problems such as affecting accuracy, achieve the effect of ensuring correctness, suppressing the influence of grid errors, and improving model resolution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
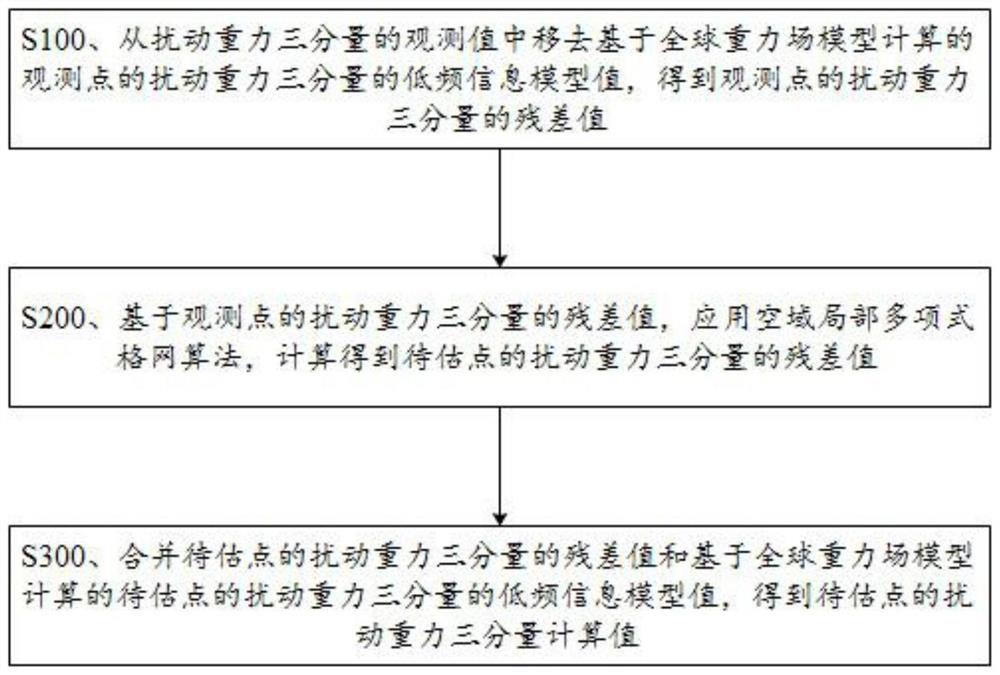
[0021] refer to figure 1 , an embodiment of the present invention provides a method for compensating inertial navigation accuracy of a local polynomial model considering frequency domain characteristics, comprising the following steps:
[0022] S100. Remove the low-frequency information model value of the three components of the disturbed gravity at the observation point calculated based on the global gravity field model from the observed values of the three components of the disturbed gravity to obtain a residual value of the three co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More