

Navigation positioning system for gravity gradient-terrain heterogeneous data matching
A gravity gradient, navigation and positioning technology, applied in the field of navigation, can solve the problems of limited application range of gravity navigation and positioning accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
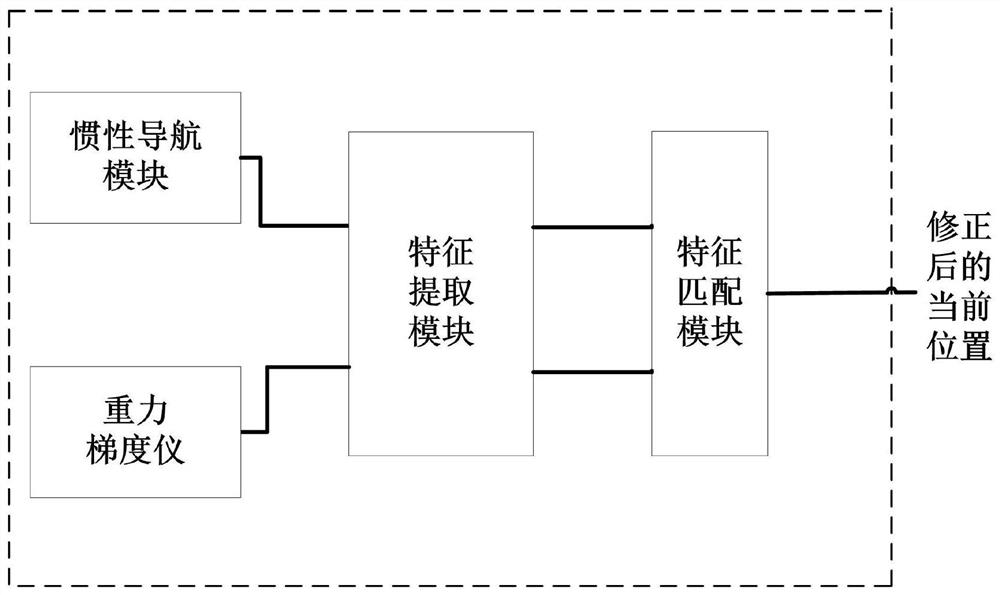
[0073] A specific embodiment of the present invention discloses a navigation and positioning system for gravity gradient-terrain heterogeneous data matching, such as figure 1 As shown, it includes: inertial navigation module, gravity gradiometer, feature extraction module, and feature matching module. Wherein, the output terminals of the inertial navigation module and the gravity gradiometer are respectively connected with the input terminals of the feature extraction module, and the output terminals of the feature extraction module are connected with the input terminals of the feature matching module.
[0074] The inertial navigation module is installed on the aircraft to be positioned, and is used to obtain the current position coordinates of the aircraft.
[0075] The gravity gradiometer is used to measure the gravity gradient tensor sequence of the route at equal time intervals.
[0076] The feature extraction module is used to extract the DQL features corresponding to th...
Embodiment 2
[0082] Improvement is made on the basis of the system in Embodiment 1, and the gravity gradiometer measures at intervals of time such as to obtain the gravity gradient tensor sequence (Γ) of n different positions (can include the current position) before the current position on the route. 1 Γ 2 … Γ n ); where, each element Γ in the sequence i Contains 9 components, satisfying
[0083] Γ i =(Γ xx Γ yy Γ zz Γ xy Γ yz Γ zx Γ xz Γ zy Γ yx ) i
[0084] i=1 2 ... n, n≥3 (1)
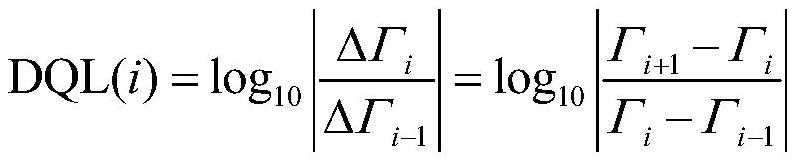
[0085] Preferably, the feature extraction module executes the following program to extract the DQL (Differential Quotient Logarithm, logarithmic scale difference space) feature corresponding to the above-mentioned gravity gradient tensor sequence:
[0086] S1. For each element in the gravity gradient tensor sequence, filter out the repeated components of the element by the following formula
[0087]
[0088] Obtaining only 5 independent components Γ i =(Γ xx Γ zz Γ xy Γ yz Γ ...
Embodiment 3
[0140] The present invention also provides a navigation and positioning method based on gravity gradient-terrain heterogeneous data matching corresponding to the system of Embodiment 1, including the following steps:
[0141] SS1. Obtain the current position coordinates of the aircraft and the gravity gradient tensor sequence of the route; specifically, the aircraft is an aircraft or an underwater vehicle;
[0142] SS2. Extracting the DQL features corresponding to the above gravity gradient tensor sequence;
[0143] SS3. Extract the DQL feature of the current position coordinates of the aircraft relative to the position coordinates of each terrain unit of the route in the topographic map;
[0144] SS4. Perform feature matching on the DQL features of the current position coordinates of the above-mentioned aircraft relative to the position coordinates of each terrain unit on the route in the topographic map, and the DQL features corresponding to the above-mentioned gravity gradi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More