

Joint positioning method for detection target by unmanned aerial vehicle group
A joint positioning and unmanned aerial vehicle technology, applied in the field of target positioning, can solve the problem of less joint positioning, achieve the effect of small impact, achieve positioning, and not easy to lose the target
Pending Publication Date: 2021-06-01
中国人民解放军陆军边海防学院
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the use of multiple UAVs to achieve joint positioning of targets is still relatively small.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
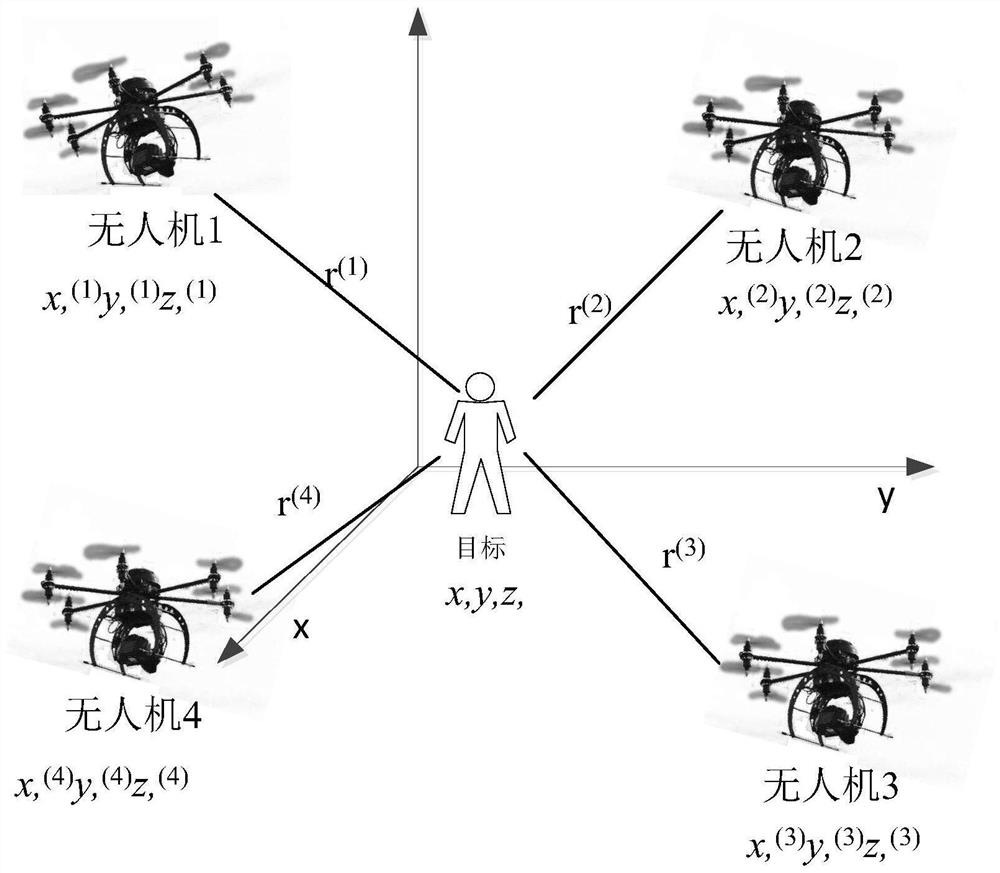
[0044] Such as figure 1 As shown, in the drone group, the coordinates of the target to be measured are x, y, z, and the four drones simultaneously obtain four distances r(1), r(2), r(3), r(4) to the target , and then use the coordinates of the four drones themselves (x(1), y(1), z(1); x(2), y(2), z(2); x(3), y(3 ), z(3); x(4), y(4), z(4)), solve the coordinates x, y, z of the target.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
The invention provides a joint positioning method for a detection target by an unmanned aerial vehicle group, which relates to the technical field of target positioning. The method comprises the following steps of 1, obtaining known three-dimensional coordinate position information of a plurality of unmanned aerial vehicles, 2, obtaining the distance from a to-be-solved target to a plurality of unmanned aerial vehicles with known three-dimensional positions, 3, initializing a position calculation equation, 4, obtaining a to-be-solved target coordinate according to a distance intersection method, and 5, judging the reliability of the result, and giving the result. When the method is applied to the unmanned aerial vehicle group, the target is not easy to lose, the influence of the coordinate error of a single unmanned aerial vehicle is small, the uninterrupted and high reliability of the unmanned aerial vehicle group on the target positioning can be ensured by the combined positioning of the target by multiple unmanned aerial vehicles, and the full-time positioning of the target is realized.
Description
technical field [0001] The invention relates to the technical field of target positioning, in particular to a joint positioning method for a detection target by an unmanned aerial vehicle group. Background technique [0002] Most of the existing UAVs use a single machine to locate the target. The positioning of a single UAV has the advantages of simple organization and no need for coordination. However, the positioning of a single UAV is affected by the coordinates of the UAV itself. Larger, once its own coordinates are wrong, it will cause target positioning errors. In addition, in the process of tracking the target by a single machine, the target may be blocked. In this case, the target coordinates will be lost, and the full-time positioning of the target cannot be realized. With the development of UAV technology, UAVs fly together in multiple sorties to form a UAV group to achieve a greater practical effect. The UAV group has functions such as communication and mutual di...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01C21/20G05D1/10G05D1/12
CPCG01C21/20G05D1/104G05D1/12
Inventor梁必帅张晓宁田亚素
Owner中国人民解放军陆军边海防学院