

Intelligent lifting type exoskeleton robot
An exoskeleton robot and exoskeleton technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve problems such as timely adjustment and switching, affecting human body balance control, etc., and achieve the effect of simplifying the structure and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0009] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
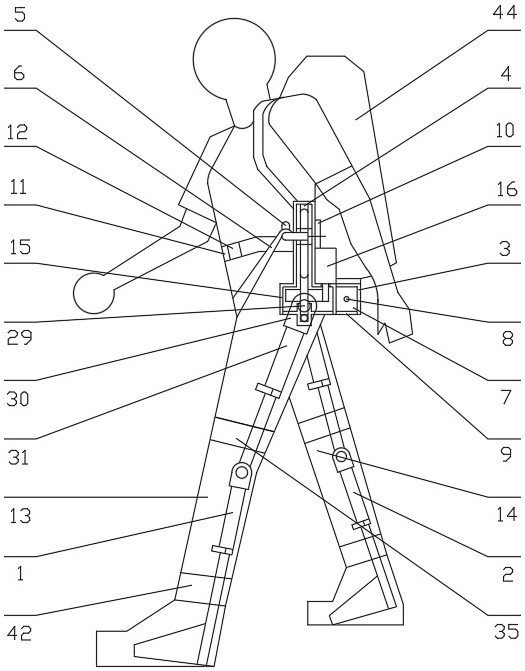
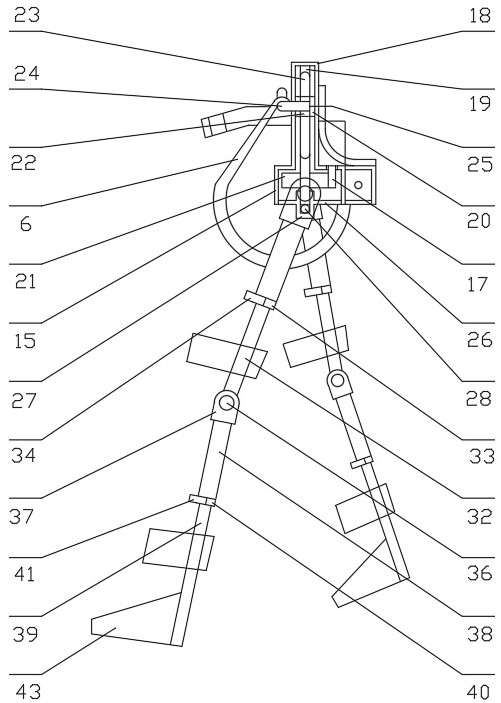
[0010] exist figure 1 , figure 2 Among them, the intelligent lifting exoskeleton robot is provided with a left power exoskeleton 1 and a right power exoskeleton 2, the rear ends of the left and right power exoskeletons are provided with a bar-shaped machine box 3, and the upper end of the left power exoskeleton is provided with a left power exoskeleton. Crane 4, the upper end of the left crane is provided with a left lifting hook 5, and the left lifting hook is connected to the left thigh annular belt 6; The right thigh annular belt, the left and right thigh annular belts are two identical annular belts respectively, the left thigh annular belt is worn on the upper end of the left thigh of the human body, and the right thigh annular belt is worn on the upper end of the human body's right thigh. When th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More