Cooperative dynamic path planning method for multiple Mars aircrafts
A dynamic path and aircraft technology, applied in the direction of instruments, attitude control, non-electric variable control, etc., can solve the problems of Mars spacecraft detection difficulties, harsh atmospheric environment, complex terrain environment of Mars, etc., and achieve the effect of preventing falling into local optimal traps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The following examples use specific examples to explain the technical solutions of the present invention. According to the following examples, the present invention can be better understood. However, those skilled in the art can easily understand that the specific technical solutions and results described in the embodiments are only used to illustrate the present invention, and should not and will not limit the present invention described in the claims.
[0079] The present invention will be further described below in conjunction with accompanying drawing:
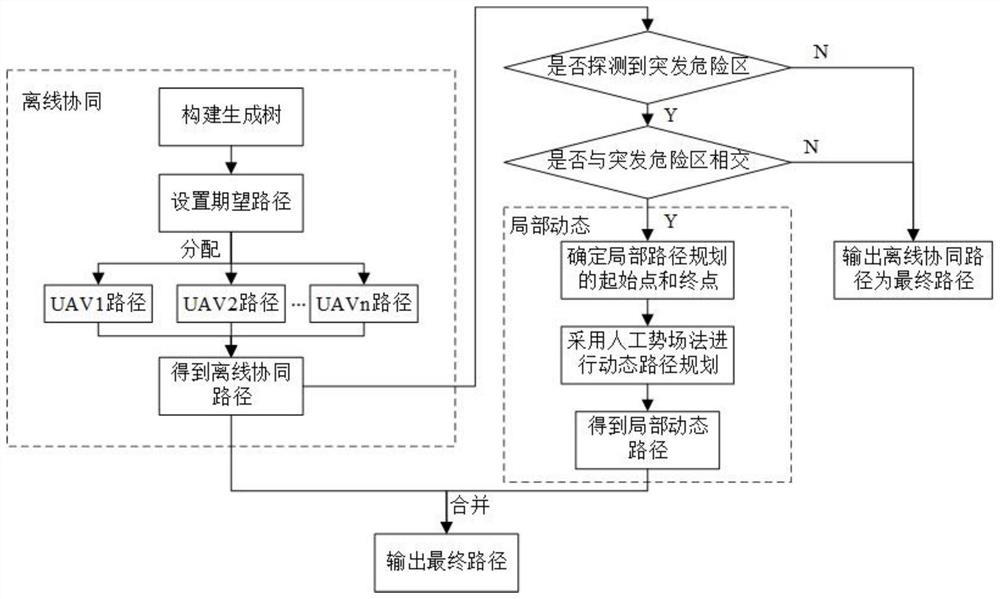
[0080] figure 1 It is a flow chart of the present invention, a collaborative dynamic path planning method for multiple Mars vehicles, comprising the following steps:
[0081] (1) Using the off-line cooperative path planning method of multiple Mars spacecraft, determine the offline cooperative path of the Martian spacecraft in a known threat environment.
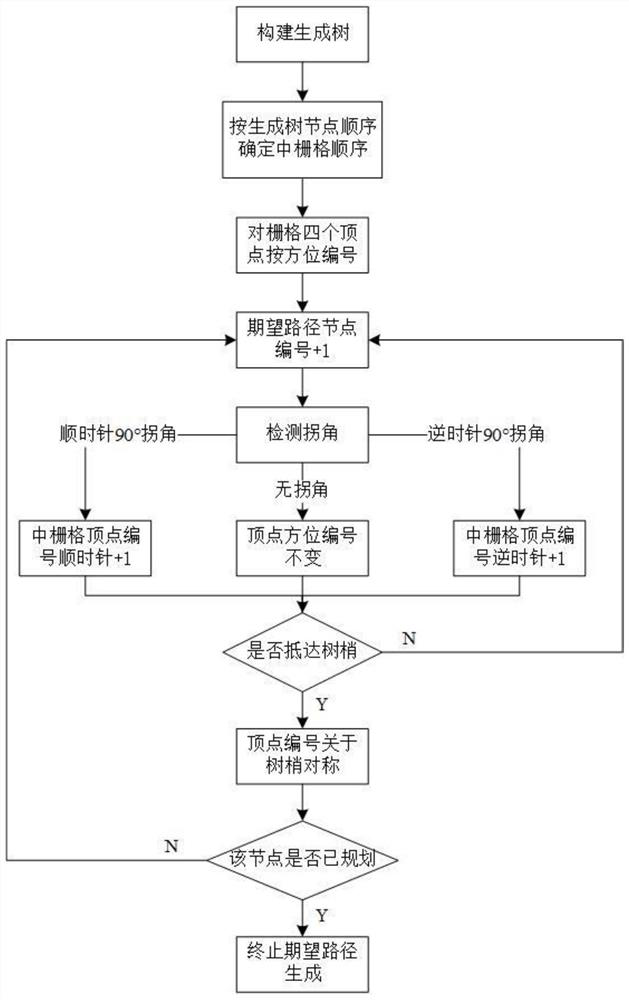
[0082] (11) Establish a map model and build a spanning tree...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap