

A multi-sensor fusion vehicle localization method involving power wheel slip correction
A multi-sensor fusion and positioning method technology, applied in the field of positioning algorithms, can solve problems such as difficulty in guaranteeing accuracy and slowing down of data update speed, and achieve the effects of improving robustness, accurate position estimation, and rapid fault identification.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The following is a detailed description of a proposed multi-sensor fusion vehicle positioning method involving power wheel slip correction with reference to the accompanying drawings:
[0071] A multi-sensor fusion vehicle positioning method involving power wheel slip correction, the method includes the following steps:
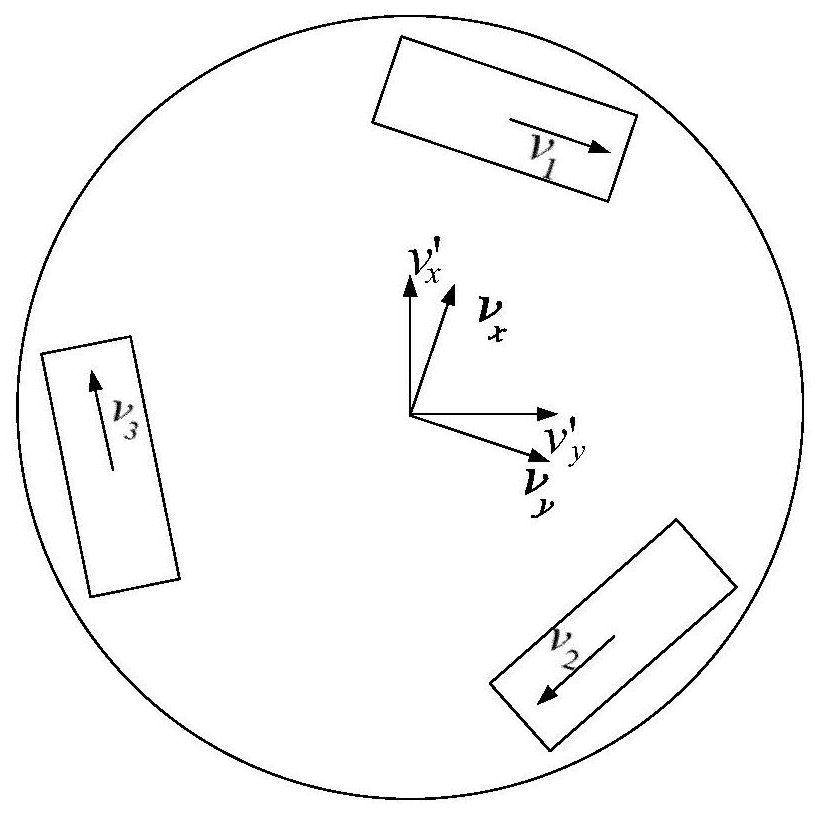
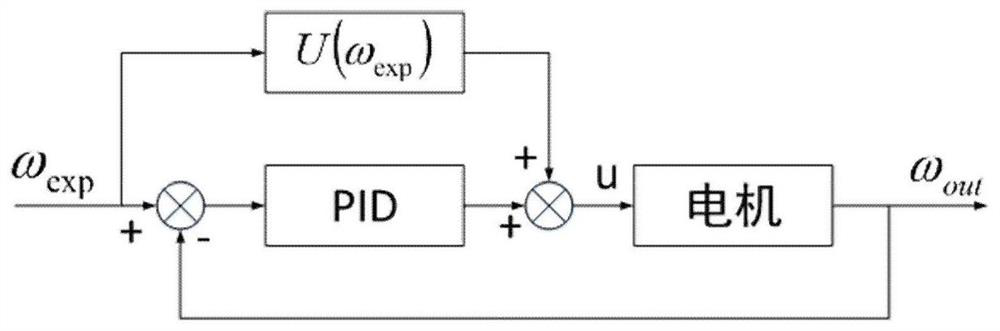
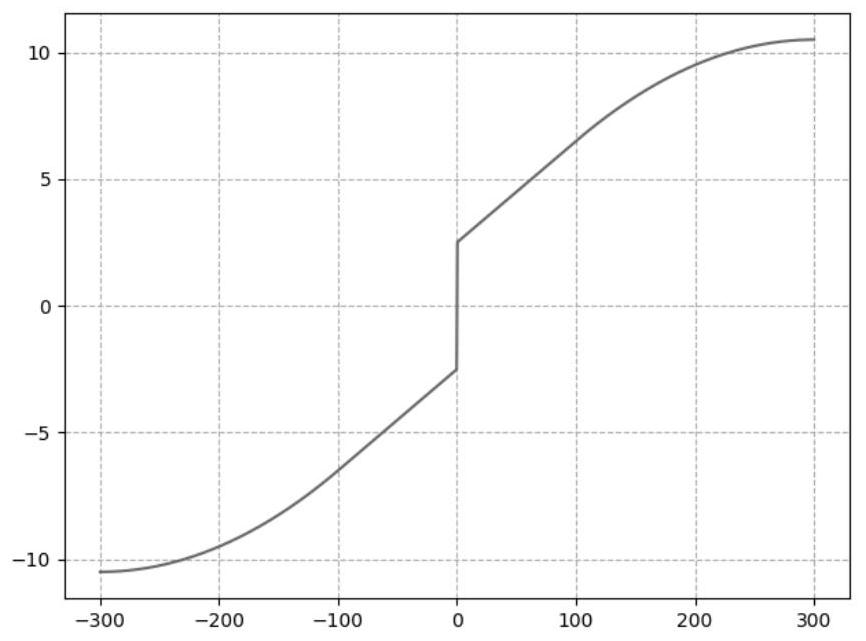
[0072] S1. Feedforward control: Use the feedforward PID algorithm to perform closed-loop control on the speed of each motor, and obtain the speed ω of the three power wheels based on the encoder data 1 , ω 2 , ω 3 , according to the size of the three power wheels, the relative speed ν of the corresponding power wheels can be obtained 1 、ν 2 、ν 3 ;
[0073] S2. Ultra-wideband positioning: Obtain the absolute position coordinates (x UWB ,y UWB );
[0074] S3. Slip correction: Estimate the relative speed correction value ν of each power wheel according to the motor load state X_corr , (X=1,2,3), based on the model solution, the vehicle's horizont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More