

Geometry correction method for vehicle-mounted scanning point cloud in tunnel GNSS denied environment
A technology for geometric correction and scanning points, applied in the field of laser scanning and mapping, it can solve problems such as non-rigid deformation of point cloud data, and achieve high correction accuracy and efficiency, and the algorithm process is simple, reliable and accurate data support.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
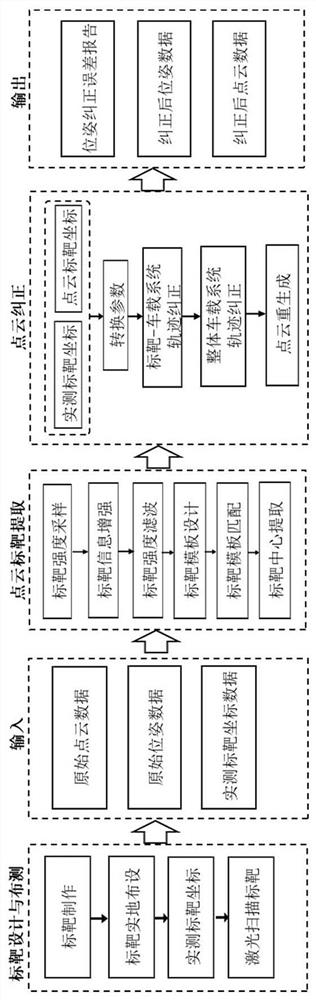
[0058] The geometric correction method of the vehicle-mounted scanning point cloud under the tunnel GNSS denial environment that this embodiment proposes comprises the following steps:
[0059] S1. In the tunnel area, carry out on-site target layout. The targets are arranged in groups along the tunnel extension direction. Each group includes more than 4 targets, and the interval between groups is set;
[0060] S2. Obtain the tunnel point cloud data including the point cloud data of each target through the surveying and mapping of the vehicle-mounted scanning system; measure the calibration point coordinates of each target through the tunnel measurement control network;
[0061] S3. Process the tunnel point cloud data, extract the corresponding target point cloud data in the point cloud data, and further obtain the calibration points between the target point cloud data and the measured target according to the extracted target point cloud data Corresponding point coordinates of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More