

Unmanned aerial vehicle flight path planning method, device and equipment and storage medium
A flight path and drone technology, applied in the field of drones, can solve problems such as high processor hardware requirements, and achieve the effect of low hardware requirements, strong practicability, and efficient algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
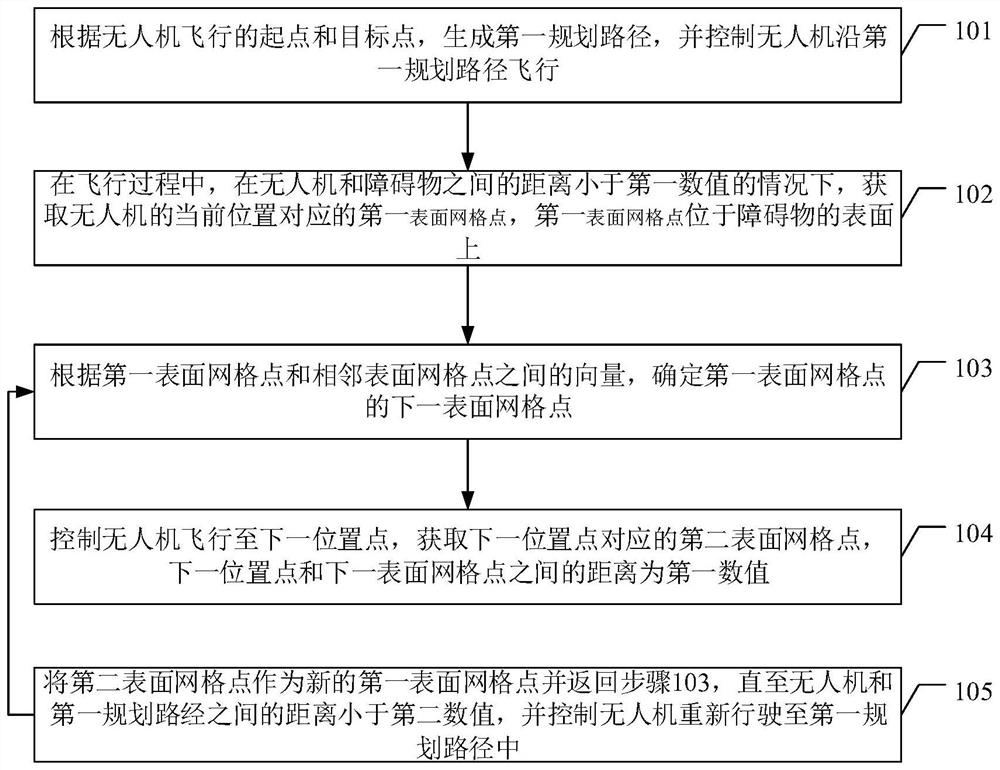
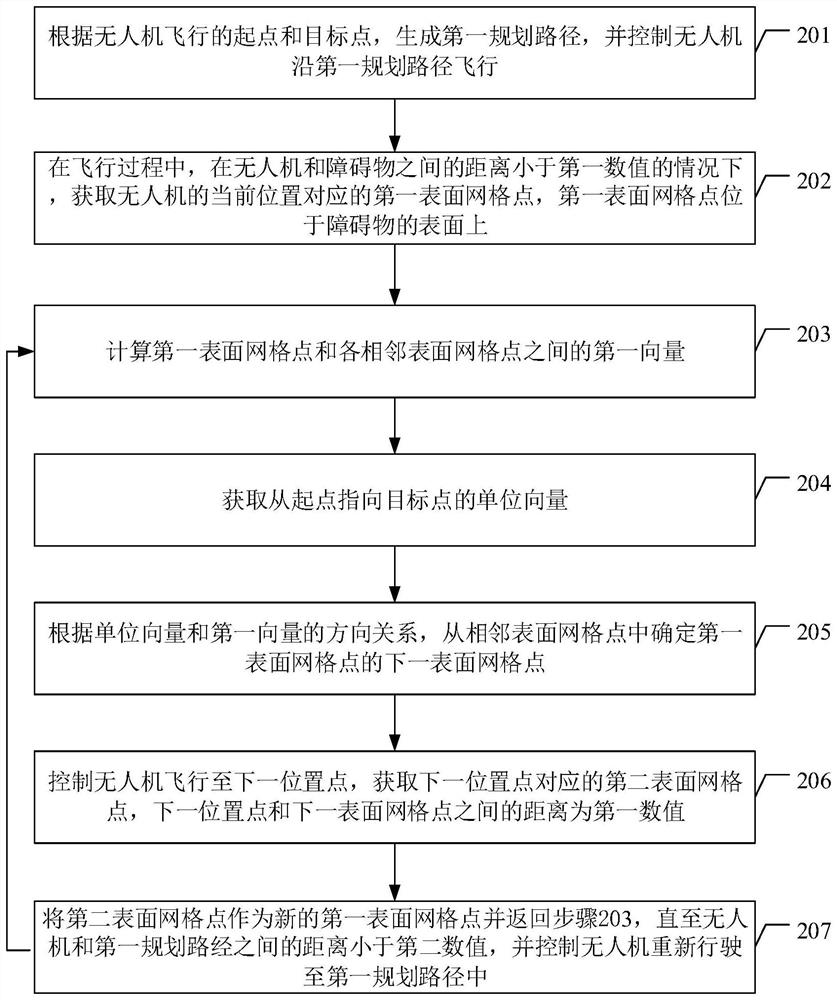
[0055] The embodiment of the present application provides a UAV flight path planning method, device, equipment and storage medium, which solves the existing UAV path planning method, which is mostly based on more complex methods such as artificial intelligence. The requirements are high, and it is not easy to make real-time adjustments according to the changes in the on-site working conditions during the actual flight of the UAV.
[0056] In order to enable those skilled in the art to better understand the method of the present application, the technical method in the embodiment of the present application will be clearly and completely described below in conjunction with the accompanying drawings in the embodiment of the present application. Obviously, the described embodiment is only It is a part of the embodiments of this application, not all of them. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More