

Low-load and high-efficiency transformer substation intelligent inspection system
A technology of intelligent inspection and substation inspection, which is applied in the field of substation inspection, can solve the problems of reducing the timeliness of monitoring data, poor security, and difficult deployment, and achieve the effects of improving timeliness and efficiency, saving deployment costs, and reducing memory burdens
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040]The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
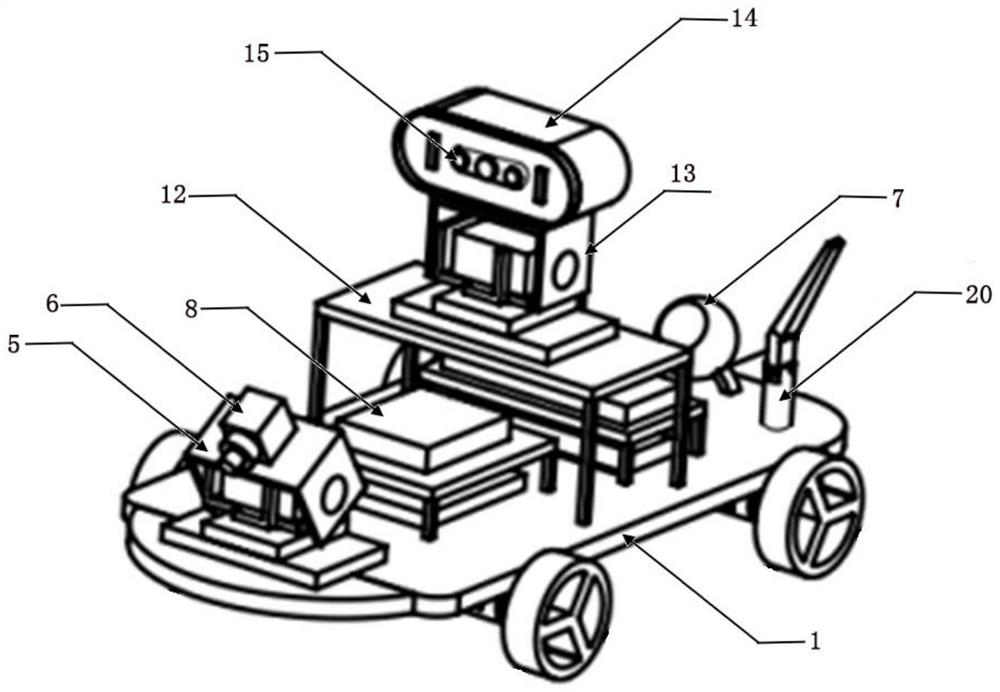
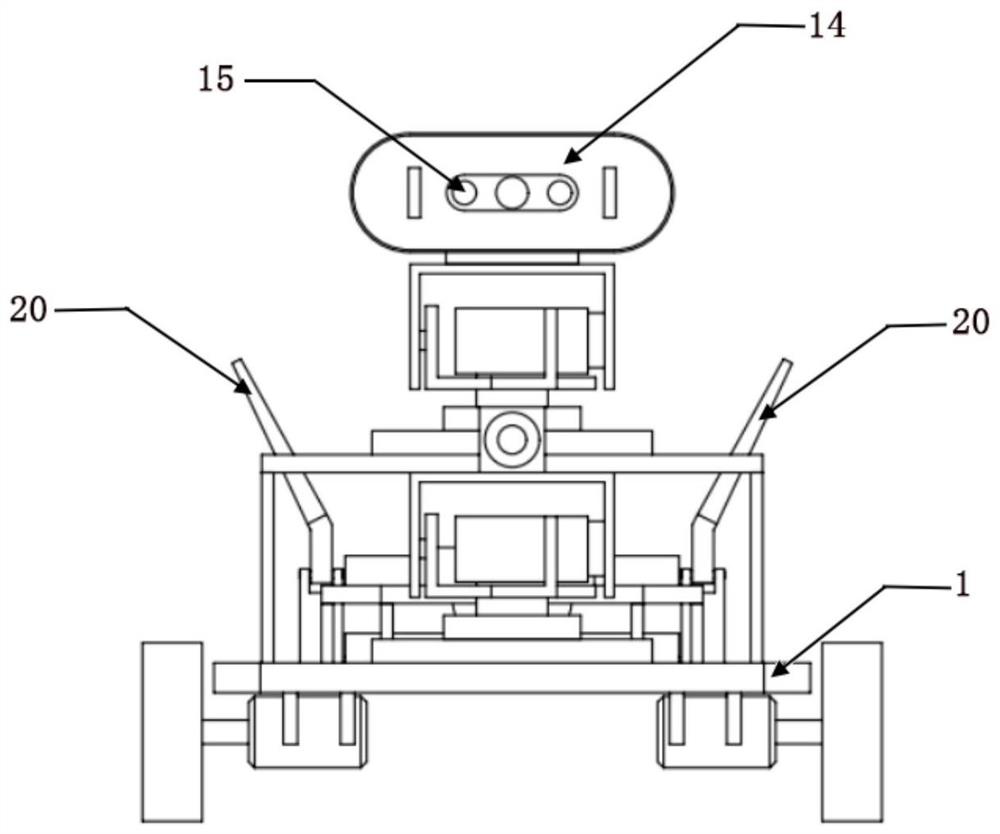
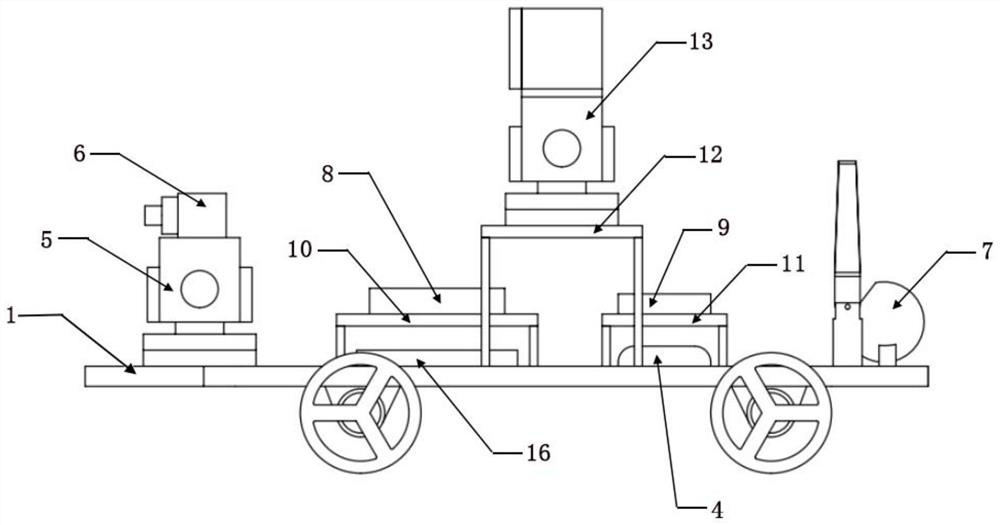
[0041] A low-burden and high-efficiency substation intelligent inspection system, such as figure 1 , figure 2 , image 3 , Figure 4 with Figure 5 , including a patrol robot, several positioning base stations and a host computer, the patrol robot includes a patrol trolley, the patrol trolley is provided with a controller 8 and a navigation module connected to the controller 8, a sensing module, a wireless communication device 9 and The RFID reader 16, the controller 8 controls the inspection robot to advance along the preset inspection path through the navigation module, and seve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More