

Flapping wing flight attitude control method based on L1 self-adaption
An adaptive controller, flight attitude technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problems of adjusting flight attitude, dynamic model without considering external wind disturbance and self-vibration, etc. Good transient response characteristics and the effect of increasing parameter uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0050] Embodiment 1, a kind of flapping wing flight attitude control method based on L1 self-adaptation, comprises the following steps:
[0051] Step 1: Establish a flapping wing flight motion model.
[0052] The specific introduction of the flapping wing flight motion model is as follows:
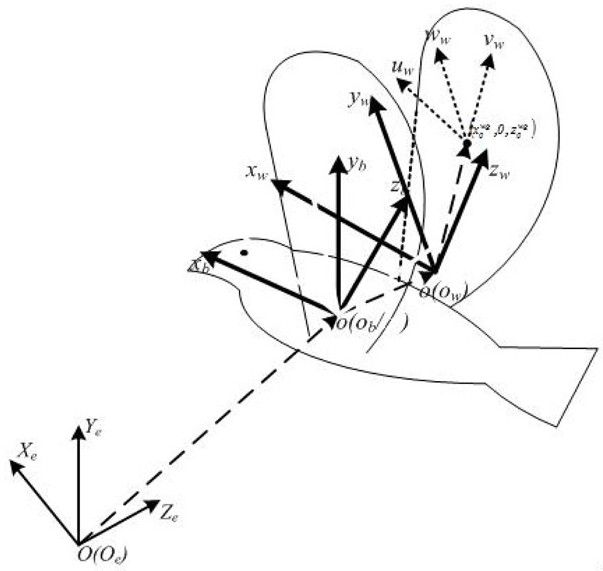
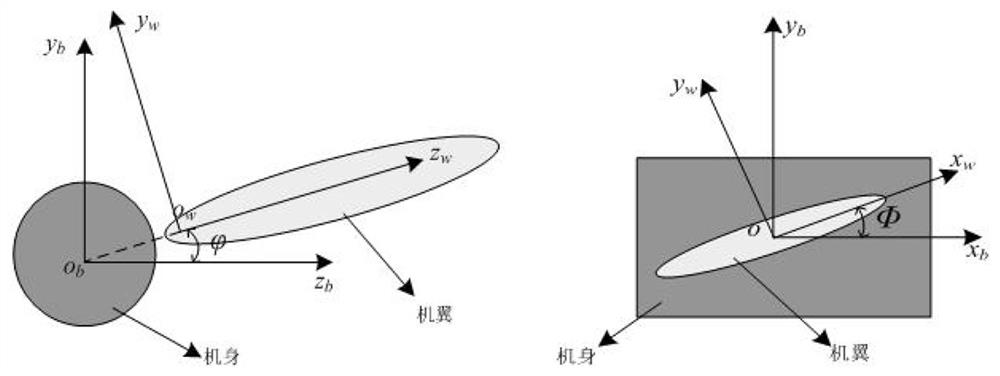
[0053] 1. Definition of the coordinate system of the flapping wing flight motion model
[0054]Flapping-wing bionic ammunition imitates birds to generate the power required for flight by flapping their wings. In order to establish a flapping-wing flight motion model, it is necessary to define a set of coordinate systems for the flapping-wing flight movement process. During the flapping wing flight, since the center of mass and moment of inertia of the flight system will change during the flapping wing up and down, the position of the center of mass and the moment of inertia of the system during flapping wing flight are time-varying functions. Therefore, it is necessary to describe the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More