

High-precision parameter path interpolation method and system
A high-precision, parametric technology, used in general control systems, control/regulation systems, instruments, etc., can solve the problem that the interpolation parameter path cannot suppress acceleration fluctuations, etc., to improve motion stability and reduce output trajectory acceleration fluctuations. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0072] The technical solutions of the present invention will be further explained below through specific examples.
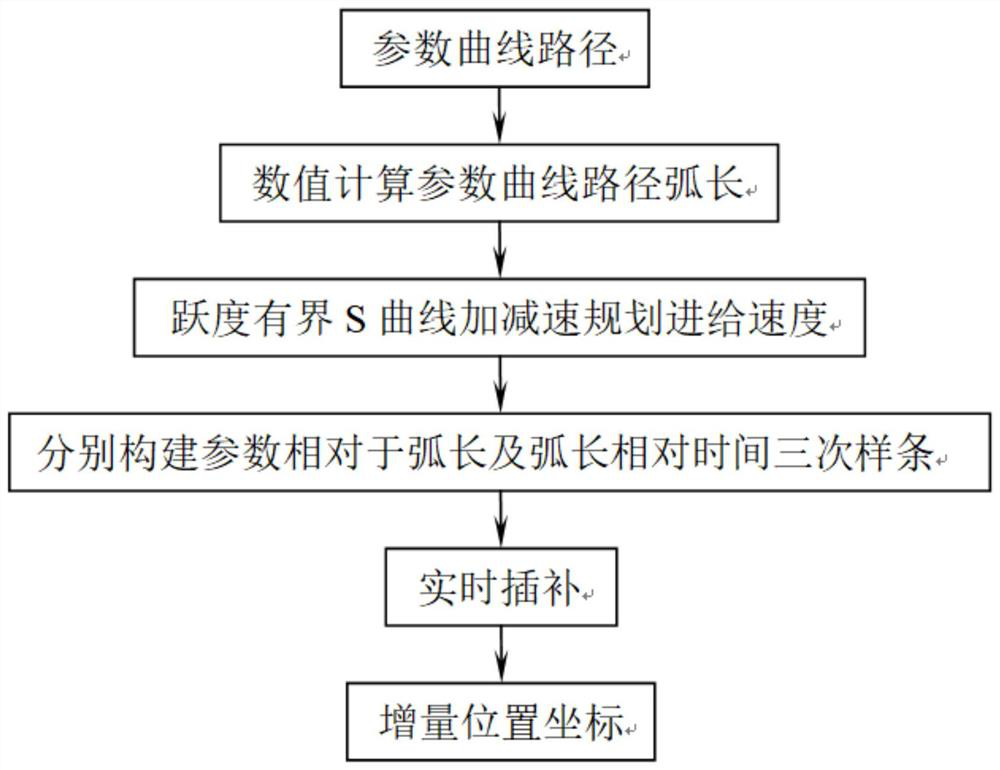
[0073] Such as figure 1 As shown, the high-precision parameter path interpolation method in the embodiment of the present invention includes the following steps:
[0074] S0, acquisition parameter curve path;
[0075] S1. Based on the curvature monotonicity of the parameter curve path, the parameter curve path is divided according to the critical curvature value point and the curvature extremum point, and the arc length of each segment is obtained;
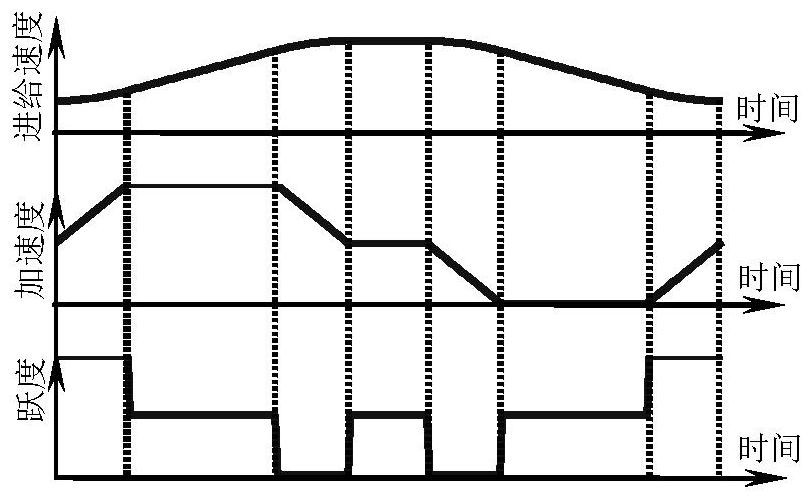
[0076] S2. Use the S-curve acceleration and deceleration algorithm with bounded jerk to plan the speed of each segment respectively;
[0077] S3. Based on the arc length of each segment and the velocity of each segment, the arc length versus time spline and the parameter versus arc length spline are respectively obtained by cubic spline fitting; more specifically, the cubic spline;
[0078] S4. In the process of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More