

Park comprehensive service intelligent robot and control method
An intelligent robot and comprehensive service technology, which is applied in the park comprehensive service intelligent robot and control field, can solve problems such as being unable to stably cross steps, and achieve the effect of preventing rollover and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
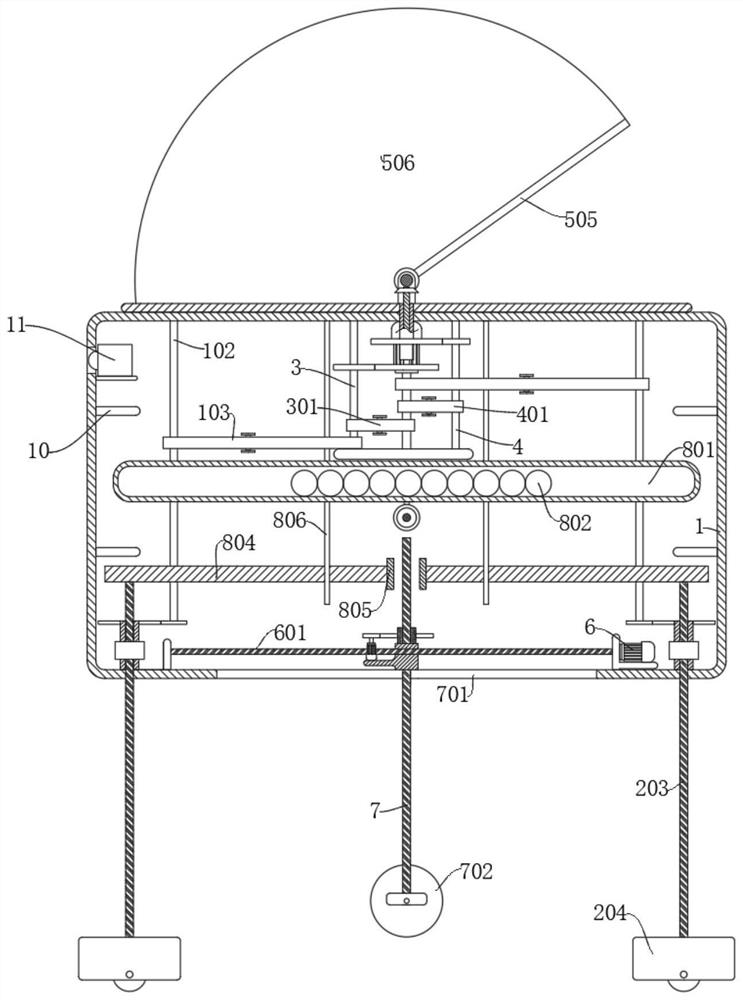
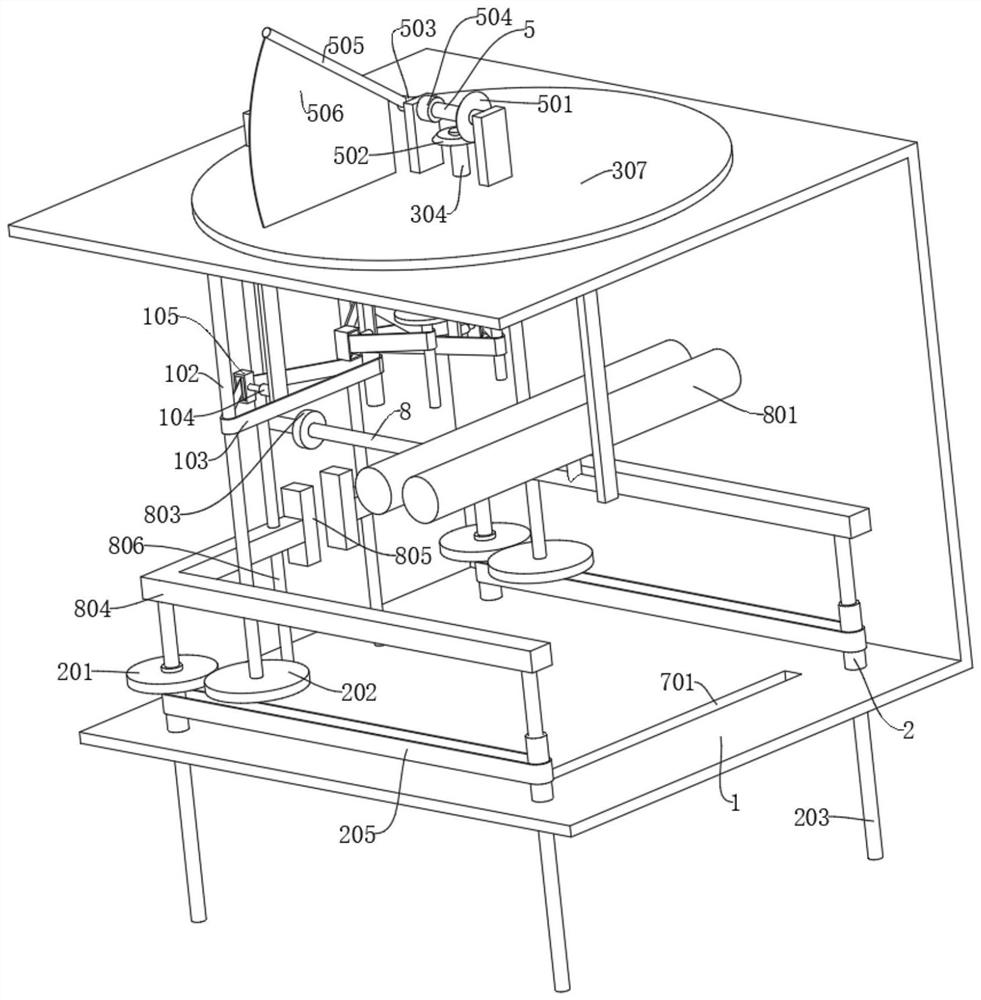
[0030] refer to Figure 1-6 , a comprehensive service intelligent robot in the park, including a box body 1, a first threaded rod 203 that can move up and down in the box body 1 and extends downwards out of the box body 1, the first threaded rods 203 are two groups of left and right, and one group is two groups. The bottom of each group of first threaded rods 203 is provided with a driving source 204, and the bottom of the driving source 204 has a driving wheel, so the number of driving sources 204 is 4, and it is characterized in that it also includes a driving mechanism located in the box body 1 , the driving mechanism can independently drive the left and right groups of first threaded rods 203 to rise or fall, and the left group or right group of first threaded rods 203 can move up and down independently.
[0031] The box body 1 is also provided with a third threaded rod 7 that can move horizontally and up and down. The third threaded rod 7 extends out of the box body 1 dow...
Embodiment 2
[0040] refer to Figure 1-6 , on the basis of Example 1, further,
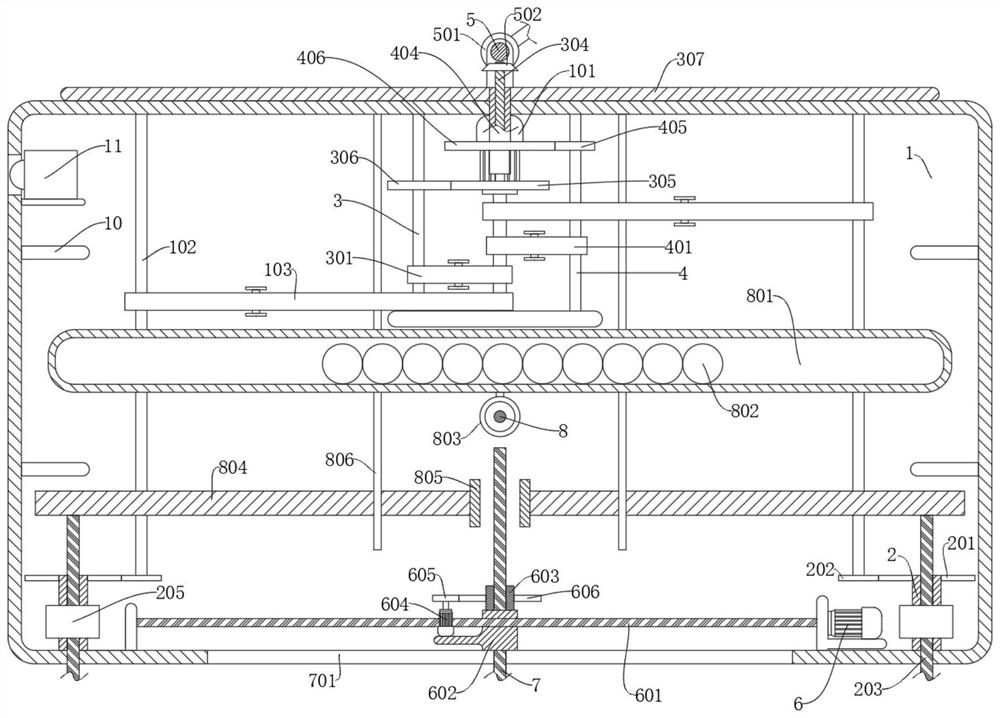
[0041] This embodiment discloses a driving mechanism, the driving mechanism includes a first motor 101 located in the box body 1, the first motor 101 is fixed on the inner wall of the top of the box body 1, and rotates the first rotating shaft 102 in the box body 1, the first The rotating shaft 102 is designed as two groups of left and right; the first belt 103 is connected between the first rotating shaft 102 of the two groups and the output end of the first motor 101, and the initial state of the first belt 103 is a loose state that does not transmit power. The loose state refers to slight looseness, as long as no power is transmitted, and it will not fall off between the first rotating shaft 102 and the output end of the first motor 101 .
[0042] It also includes a first linear device 104 located in the box body 1, a first limiting cylinder 105 fixed at the output end of the first linear device 104, a rol...
Embodiment 3
[0052] refer to Figure 1-6 , on the basis of Example 2, further,
[0053] This embodiment discloses a control structure. The control mechanism includes two fixing plates 804, which are respectively fixed on the tops of the left and right groups of first threaded rods 203; On the eighth rotating shaft 8, the eighth rotating shaft 8 is arranged horizontally.
[0054] It also includes an eleventh gear 803 fixed on the eighth rotating shaft 8 and a rack 805 fixed on the fixed plate 804 , the eleventh gear 803 and the rack 805 can be meshedly connected.
[0055] When the first threaded rod 203 on one side moves upward, it drives the fixed plate 804 on the same side to move upward, thereby making the rack 805 mesh with the eleventh gear 803, driving the eighth rotating shaft 8 to rotate, and then making the adjusting cylinder 801 on the same side One end is turned upwards, and the other side is downwards. Under the influence of gravity, the adjusting ball 802 inside slides downwa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More