Fire-disaster emergency robot system and method
A robot system, robot technology, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The working method is:
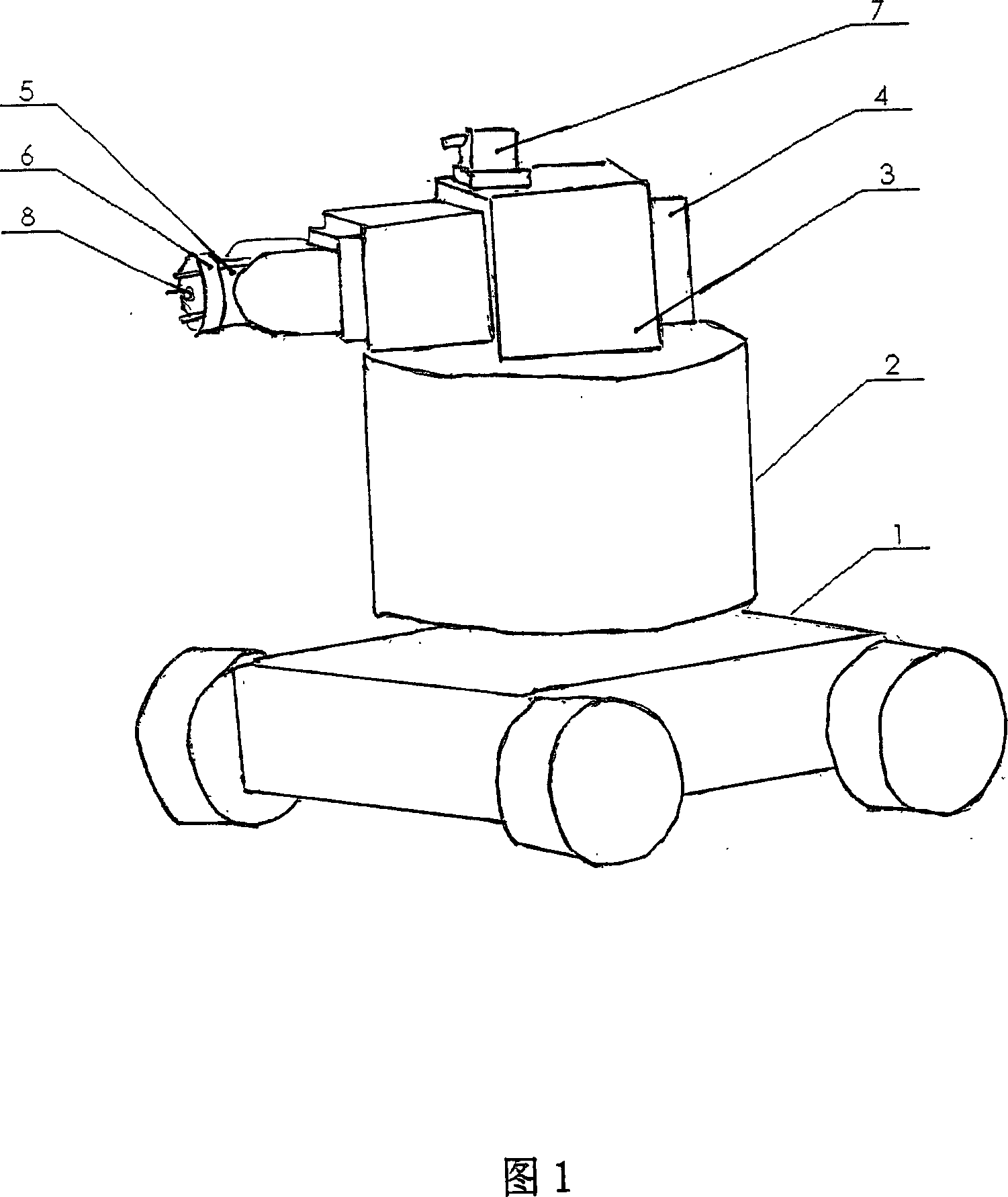
[0011] The states of the robot during stationary and moving are shown in Figure 1. The motion of the mobile platform (1) is driven by fire-resistant wheel rolling, which can cross certain obstacles. Of course, it can also be driven by crawlers. The driving mechanism is placed in the mobile platform (1), which can make it produce forward and backward and turning motions.
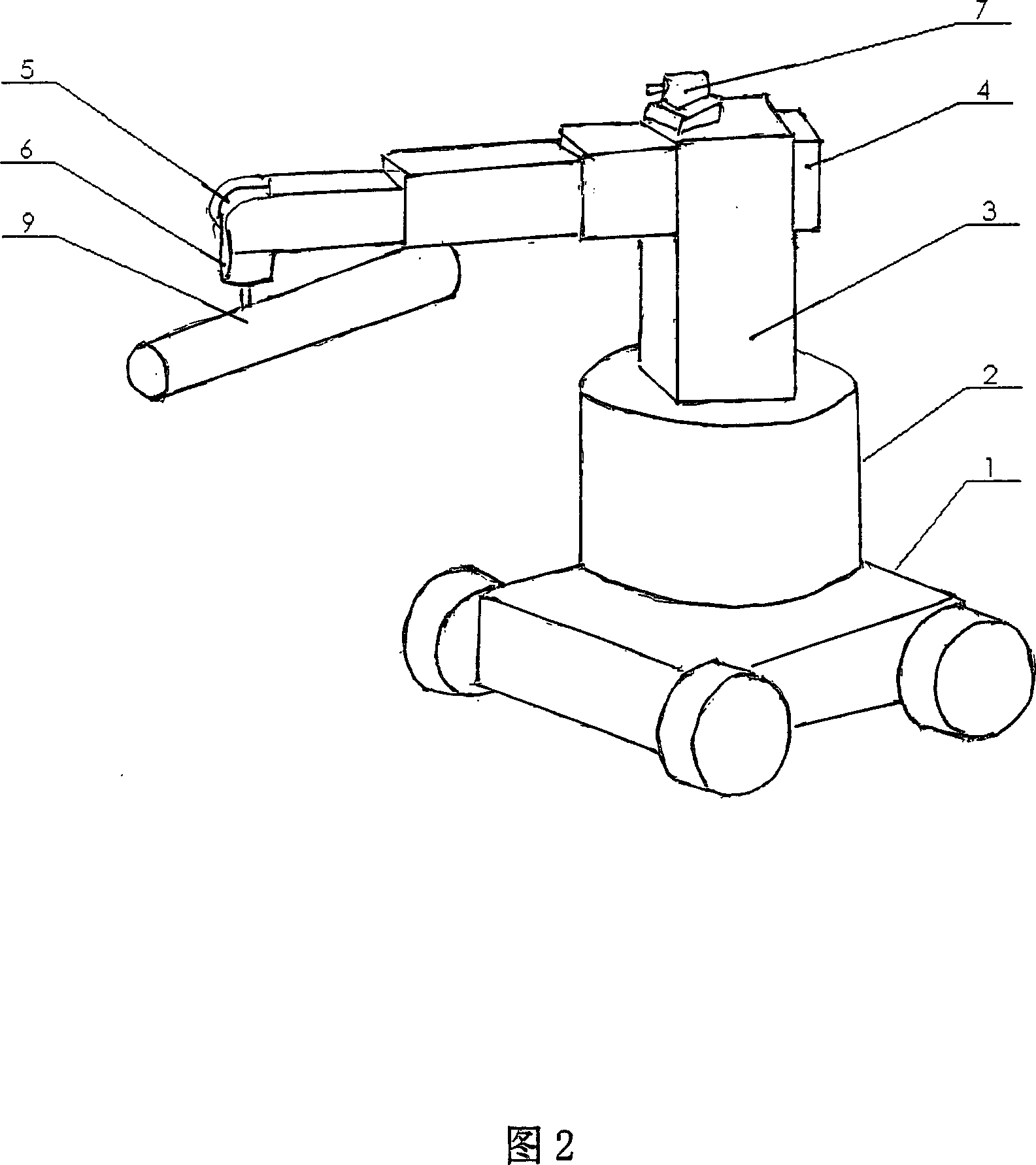
[0012] The manipulator is a tandem articulated robot, comprising several parts of a rotating body (2), a lifting body (3), a telescopic body (4), a swinging body (5) and an end chuck (6). The rotating body (2) is installed on the mobile platform (1) and can rotate in the horizontal plane. The lifting body (3) is installed in the rotating body (2) and can be raised and lowered in the direction of gravity. The telescopic body (4) is installed on the top of the lifting body (3), and can expand and contract in a direction perpendicular to the moving direction of the lifting body ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap