

Running control apparatus and running control method for vehicle
a running control and running control technology, applied in the direction of process and machine control, braking systems, instruments, etc., to achieve the effect of suppressing a sudden rise or a sudden fall
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029]The invention will be described hereinafter in detail with reference to the accompanying drawings as to an embodiment thereof. In the drawings, like reference symbols represent like parts.
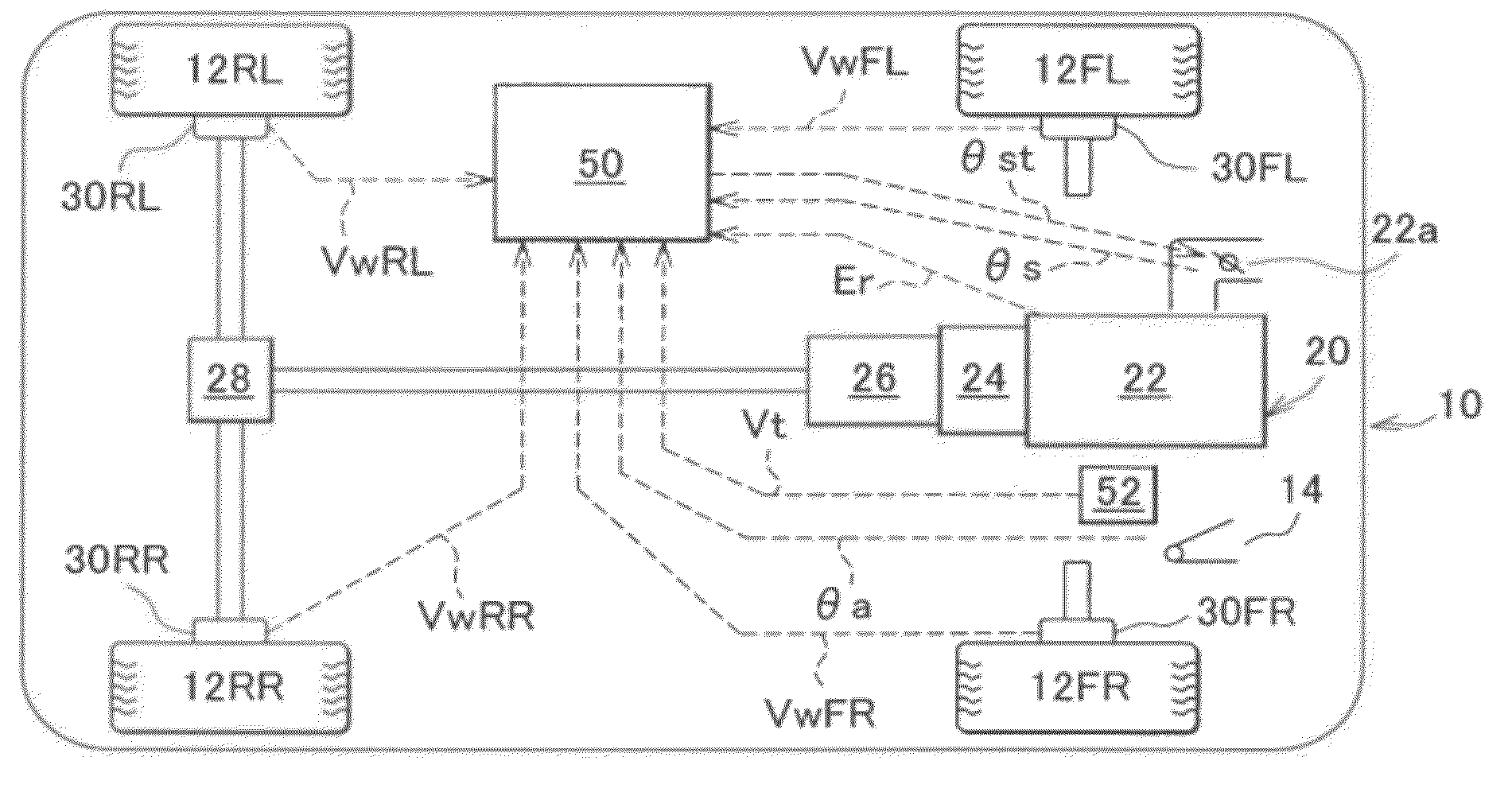
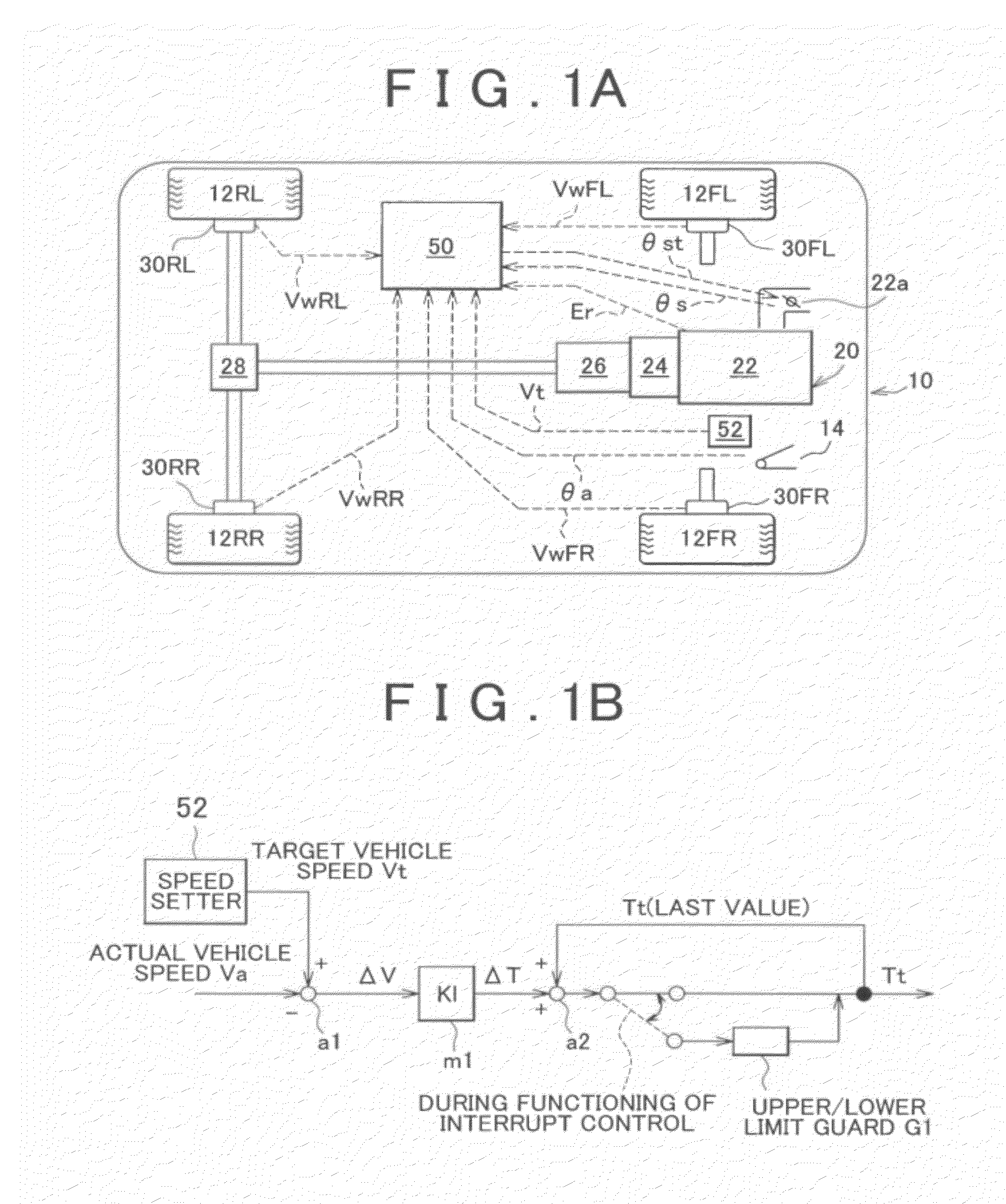
[0030](Configuration of Apparatus) FIG. 1A schematically shows an automobile mounted with a running control apparatus according to the embodiment of the invention. In FIG. 1A, a vehicle 10 having a front-left wheel 12FL, a front-right wheel 12FR, a rear-left wheel 12RL, and a rear-right wheel 12RR is mounted with a driving system 20 for generating a driving force for each of the wheels (only the rear wheels in an example illustrated in FIG. 1A because the vehicle 10 is a rear-wheel-drive vehicle) in accordance with depression of an accelerator pedal 14 by a driver in a normal mode. In the illustrated example, the driving system 20 is designed such that a driving torque or a rotational driving force that is output from an engine 22 via a torque converter 24, an automatic transmission 26, a dif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More