

Autonomous Team Formation and Task Negotiation Among Unmanned Vehicles
a technology of autonomous team formation and task negotiation, which is applied in the direction of simultaneous traffic control system, process and machine control, instruments, etc., can solve the problems of limited operation area, inability to meet all requirements of single vehicle, and inability to easily integrate additional vehicles of the same or other types in conventional systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
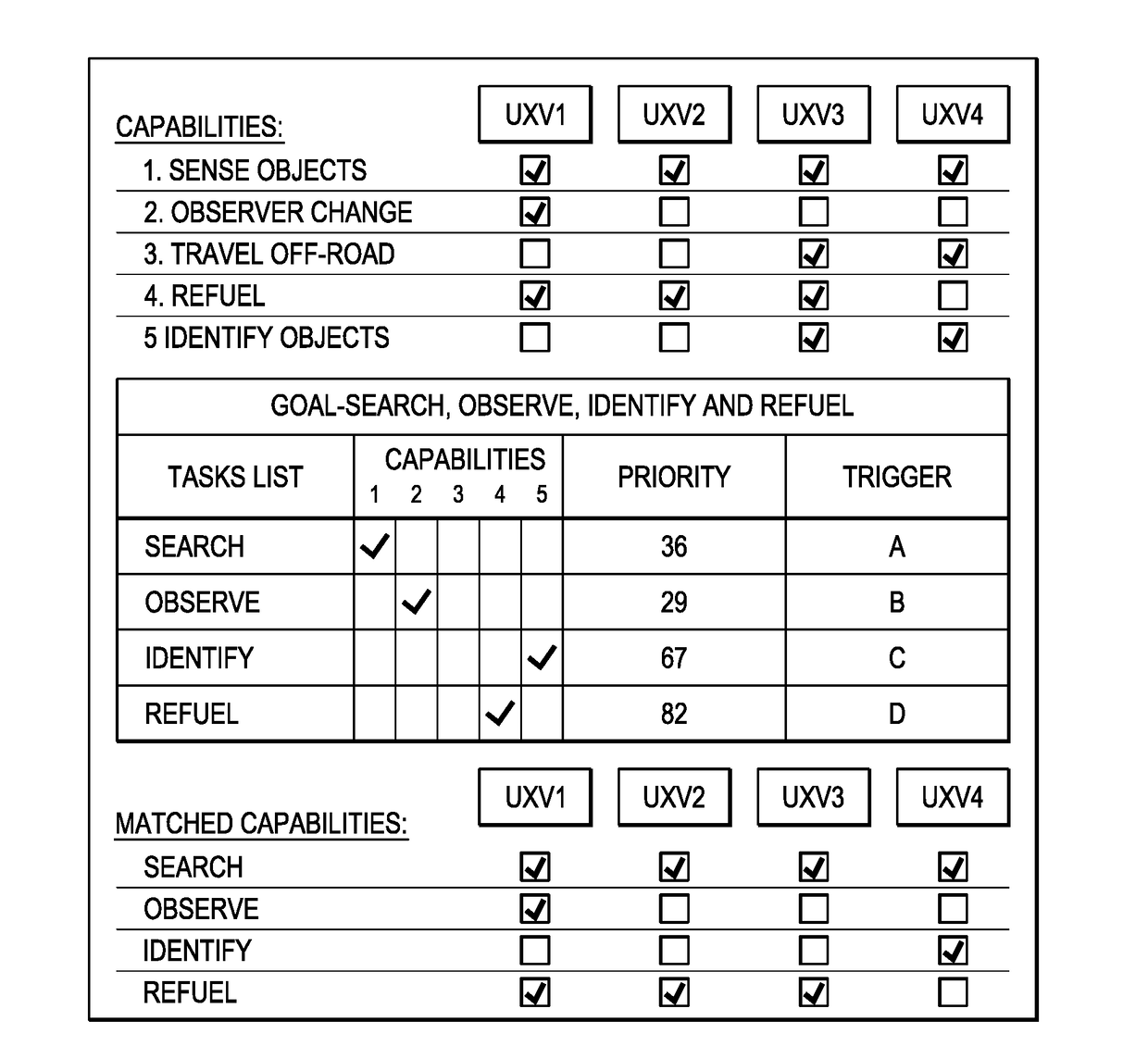
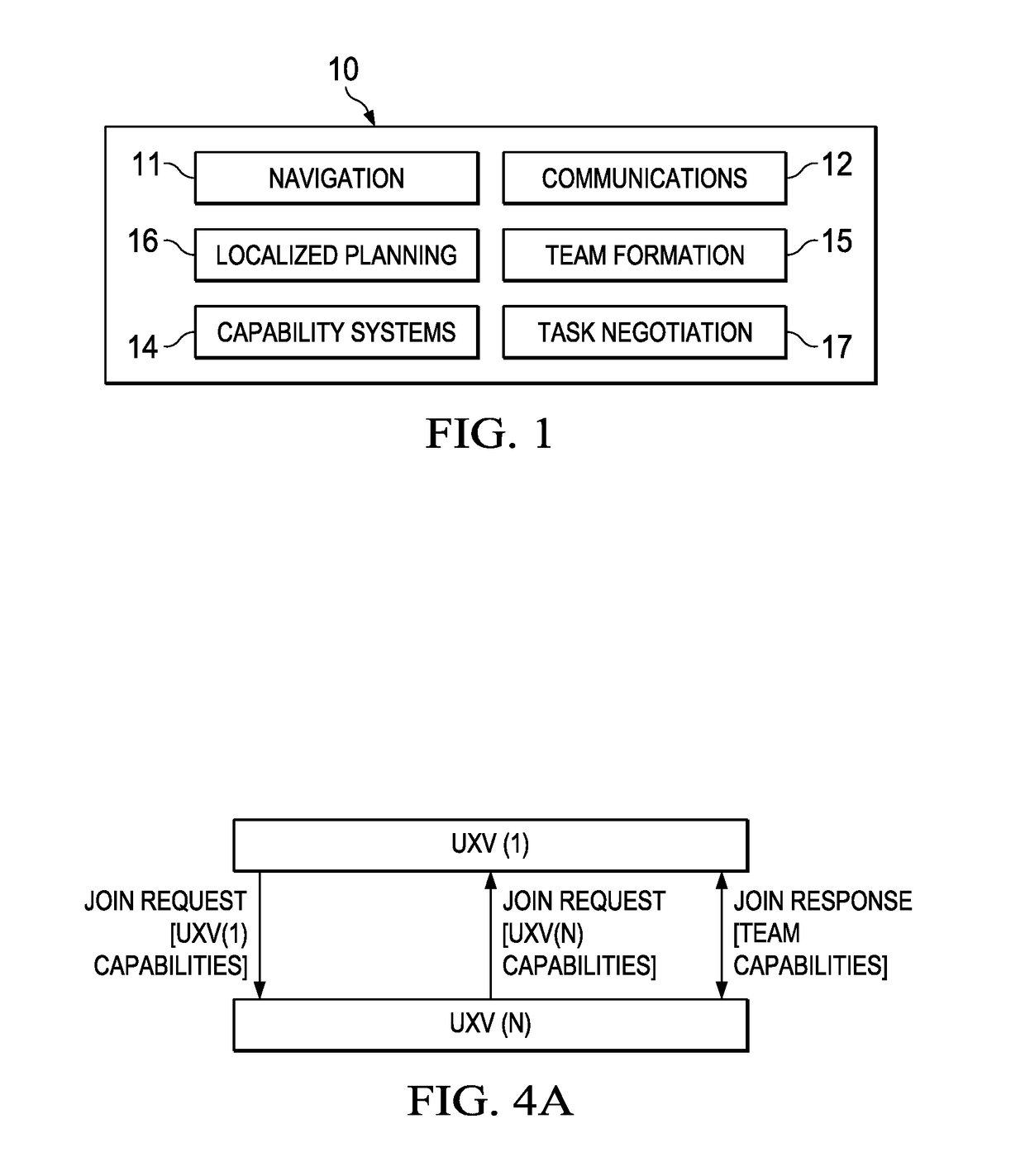
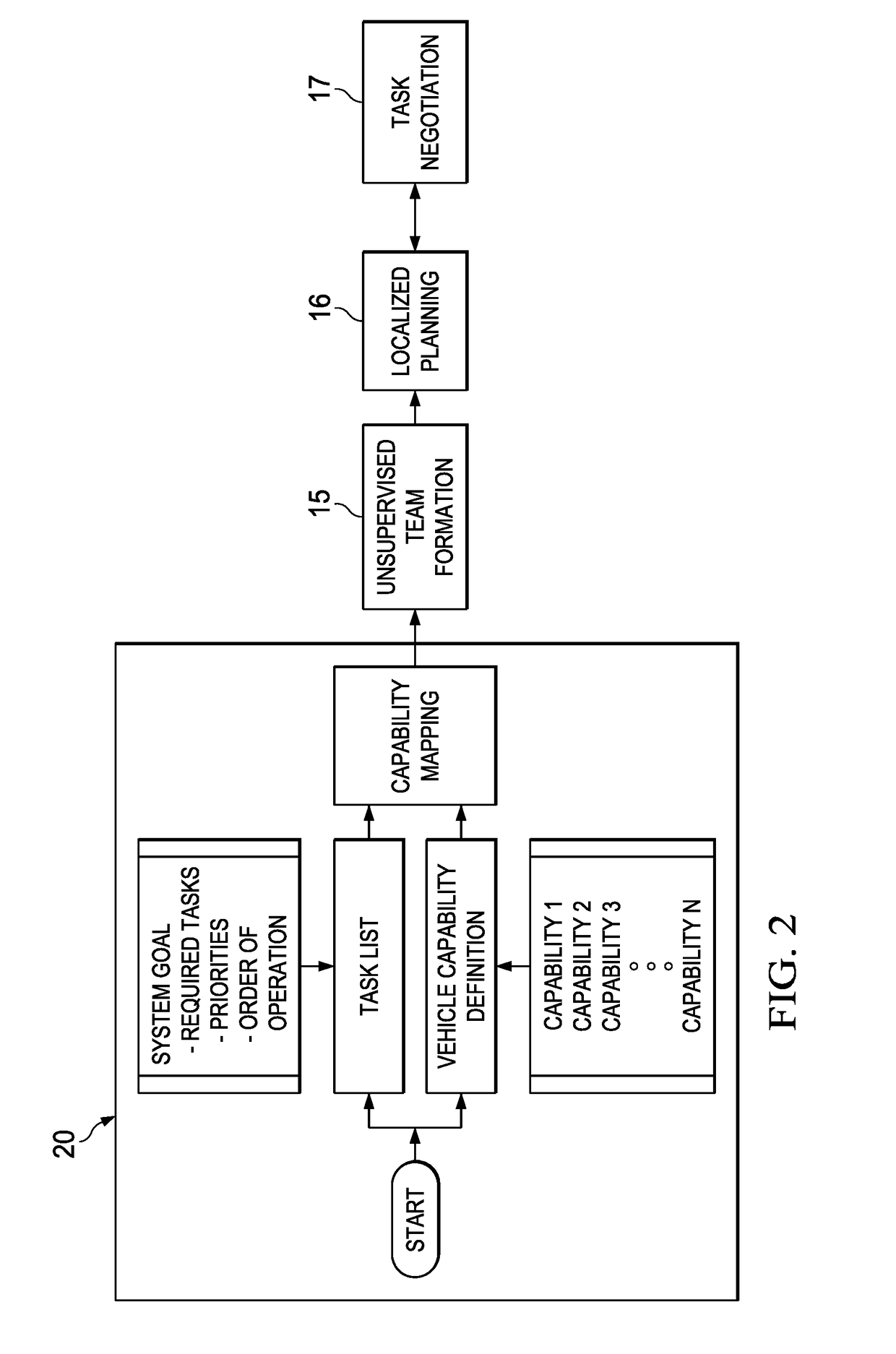
[0014]The following description is directed to a system of autonomous vehicles in which each vehicle negotiates its own role within a team of vehicles. The team is formed to accomplish a specified goal, which has an expected set of required capabilities. Each vehicle negotiates its team membership based on its own capabilities and the needs of the team, and does so without supervisory control or human intervention.
[0015]In the evolving parlance of autonomous vehicles, unmanned ground vehicles and unmanned aerial vehicles are referred to as ground vehicles (UGV's) and aerial vehicles (UAV's), respectively. In a system that uses both ground and aerial vehicles (or water vehicles), the vehicles may be more generally referred to as “UXV's”.
[0016]Autonomous vehicles may also be referred to as “agents”, and multi-vehicle systems as “multi-agent” systems. The terms “vehicle” and “agent” are used herein synonymously to mean any one of various types of UXVs.
[0017]For purposes of this descrip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More