

Humanoid robot foot section impact absorption mechanism
A humanoid robot and impact absorption technology, applied in the field of humanoid robots, can solve the problems of cumbersome operation and limited impact absorption effect, and achieve the effect of flexible continuous adjustment and convenient change
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but not as a limitation of the present invention.
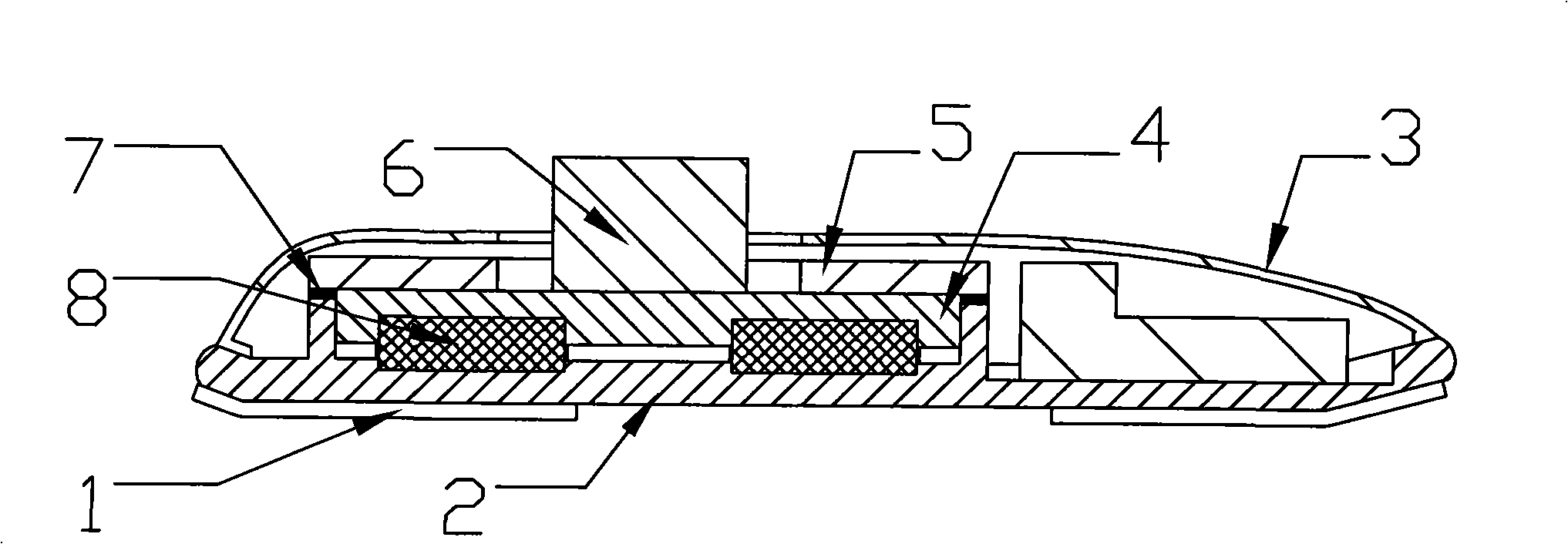
[0020] see figure 1 , a foot shock absorbing mechanism of a humanoid robot, comprising a sole plate 2, the upper surface of the sole plate 2 is connected to the lower surface of the shock-absorbing column 8, the upper surface of the shock-absorbing column 8 is connected to the upper pressure plate 4, and the upper cover plate 5 is located on the upper surface Above the pressing plate 4, the upper cover plate 5 is connected with the sole plate 2 through the adjusting washer 7, the middle part of the upper pressing plate 4 is connected with the leg of the robot through the force sensor 6 of the ankle joint of the humanoid robot, and the instep shell 3 is connected with the sole plate 2, which is non-slip The pad 1 is connected to the lower surface of the sole plate 2 .
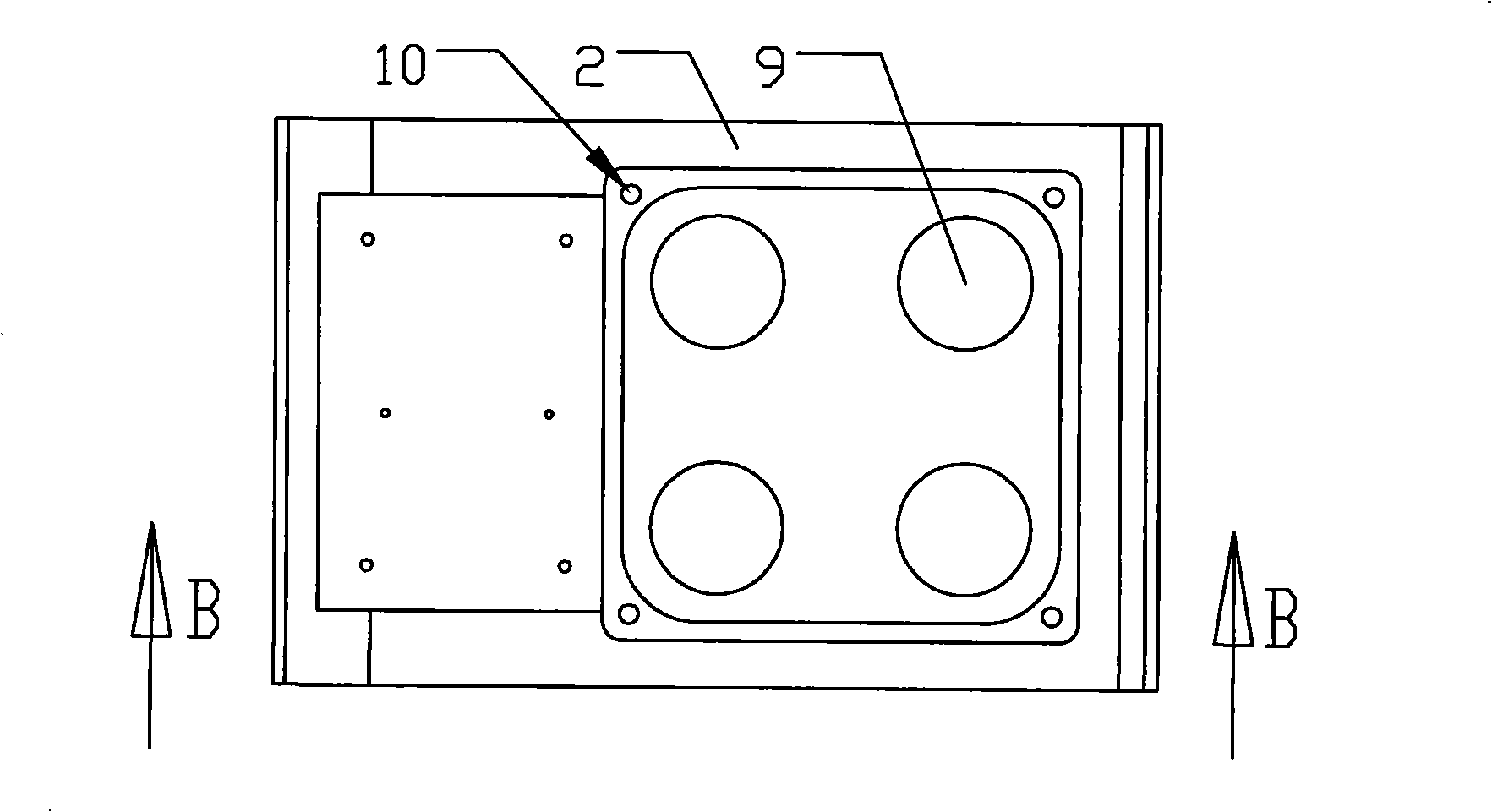
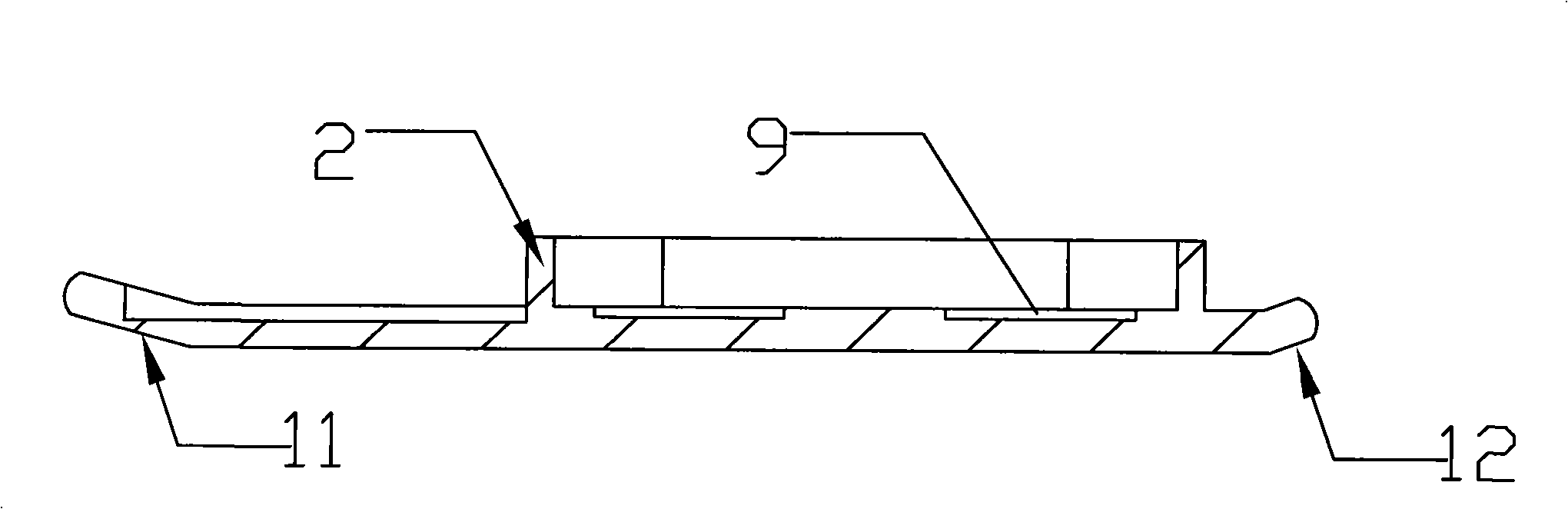
[0021] see figure 2 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More