

Two-degree-of-freedom exoskeleton ankle joint mechanism
A degree of freedom, ankle joint technology, applied in medical science, artificial legs, prostheses, etc., can solve the problems of affecting response time, contraction volume and contraction strength, functional stability disorder of ankle joint, difficult treatment and rehabilitation process, etc. , to achieve the effect of compact structure, satisfactory structure and accurate control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings, and a specific operation process will be given. The protection scope of the present invention is not limited to the following specific embodiments, as long as the technical solutions obtained by equivalent replacement and improvement of the technical features in the present invention fall within the protection scope of the claims of the present invention.
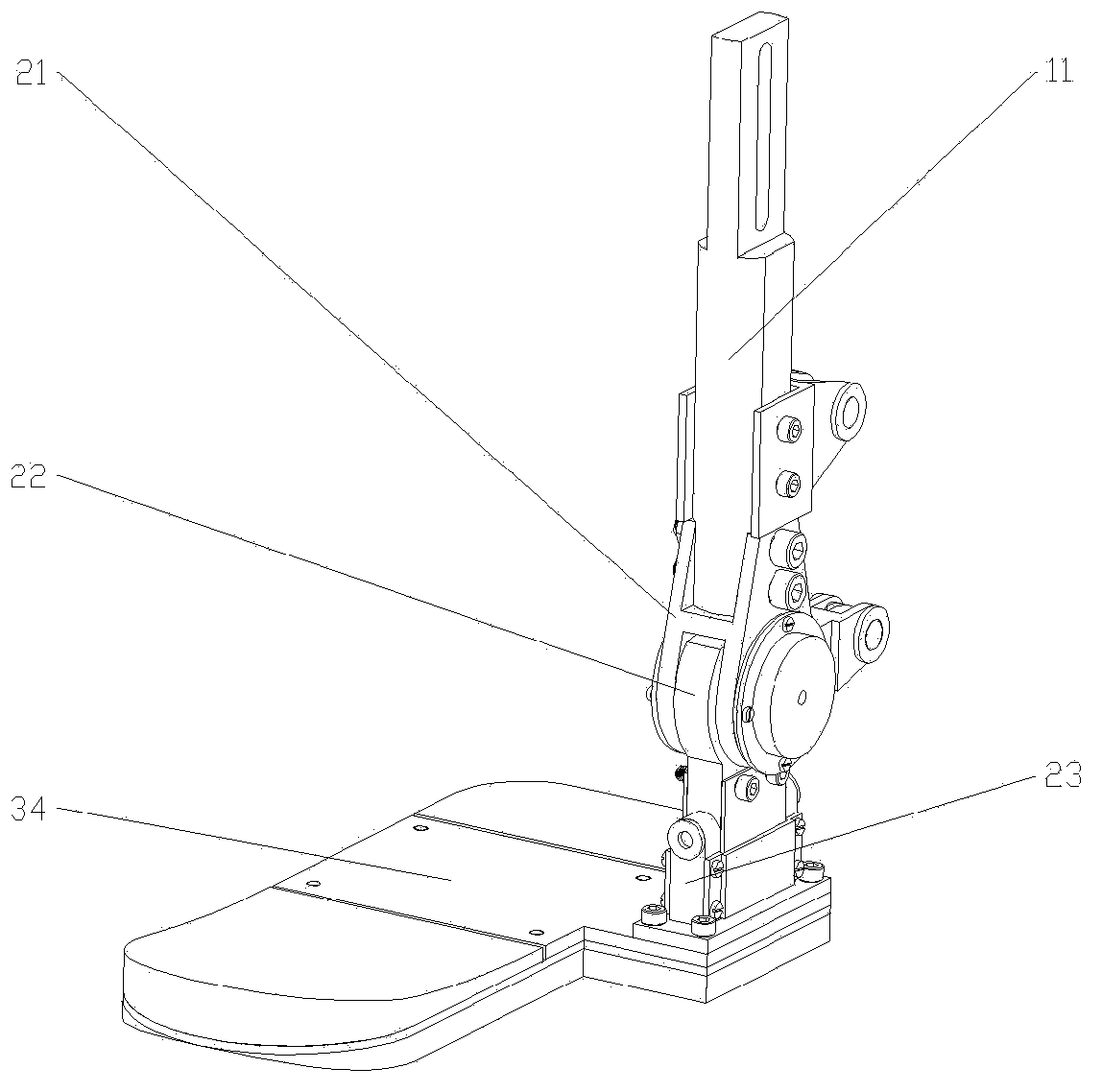
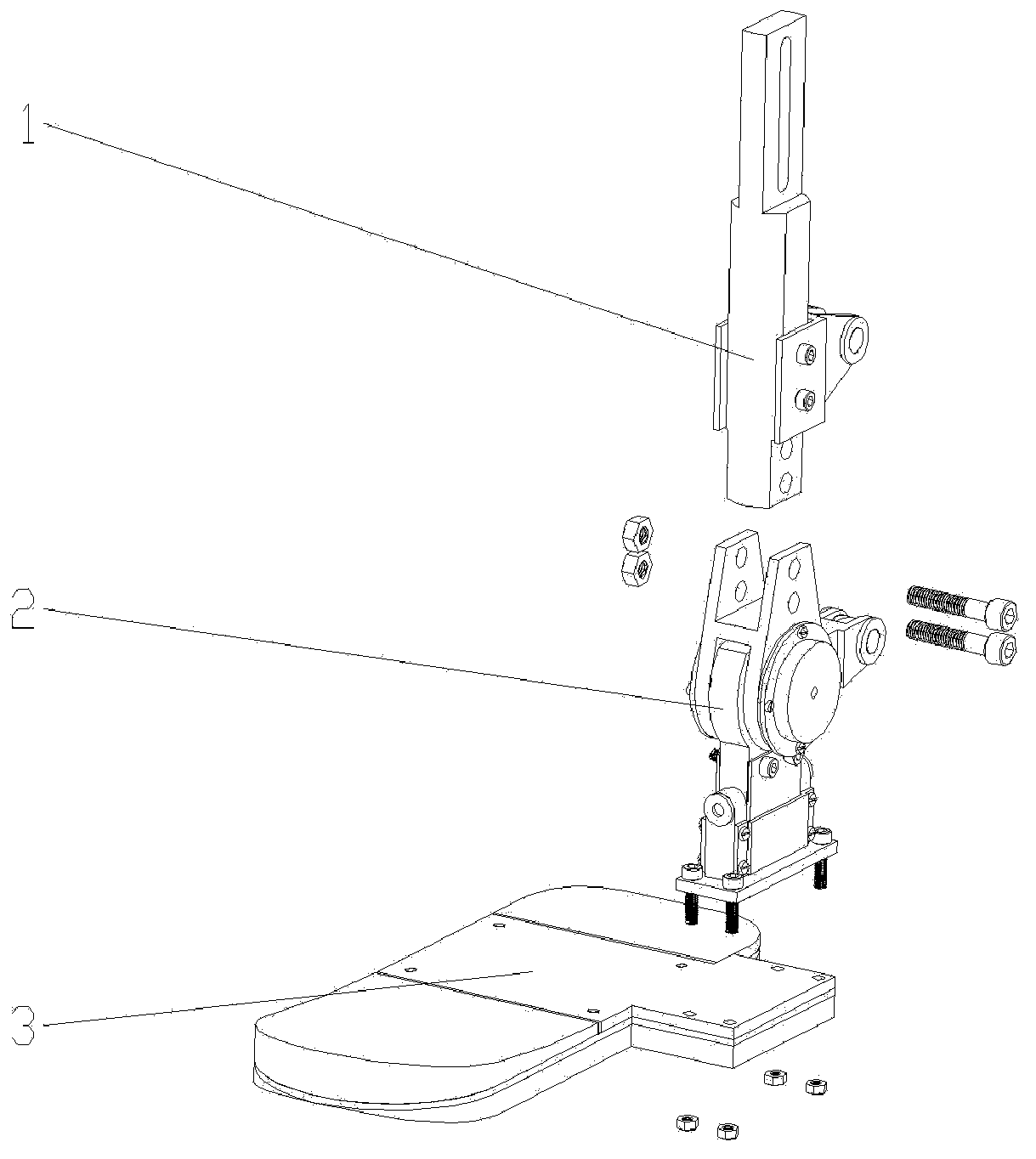
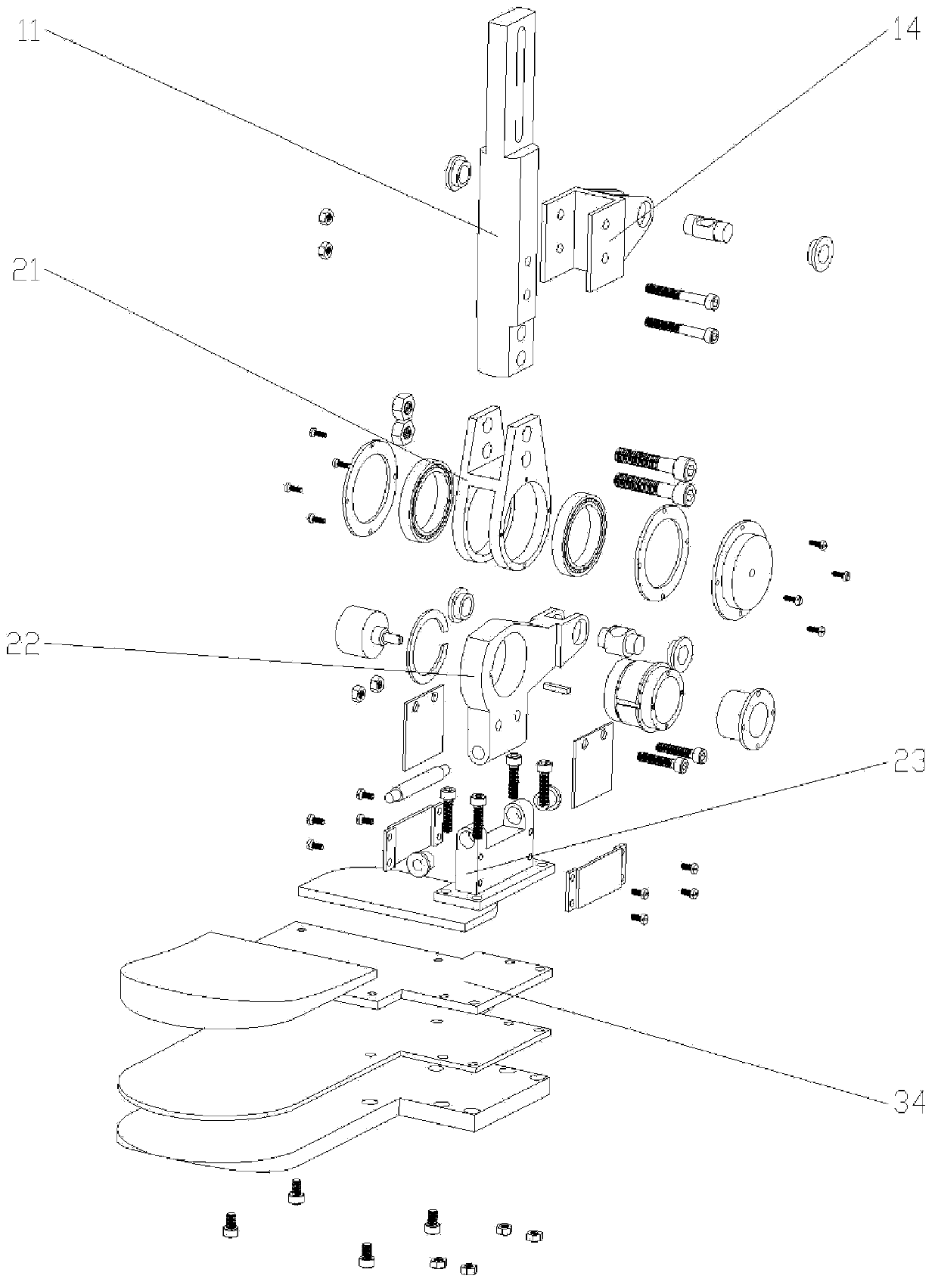
[0040] Such as Figure 1-7 As shown, a two-degree-of-freedom exoskeleton ankle joint mechanism includes three parts: a calf rod device 1, a two-degree-of-freedom device 2, and a foot device 3. The parts included in these three parts are:
[0041] Calf rod 11, driver bushing 12, driver mounting seat shaft 13, driver mounting seat 14; calf connector 21, bearing 211, potentiometer end cover 212, bearing end cover 213; upper foot connector 22, driver execution end shaft Sleeve 221, hollow shaft ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More