

Method for three-dimensionally capturing and rotating micromechanical member by using ultrasonic radiation force
A micromechanical component, ultrasonic radiation technology, applied in microstructure technology, microstructure devices, chemical instruments and methods, etc., can solve the problems of microcomponent damage, controllable object limitation, unable to solve the problem of driving objects to rotate, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with drawings and embodiments.
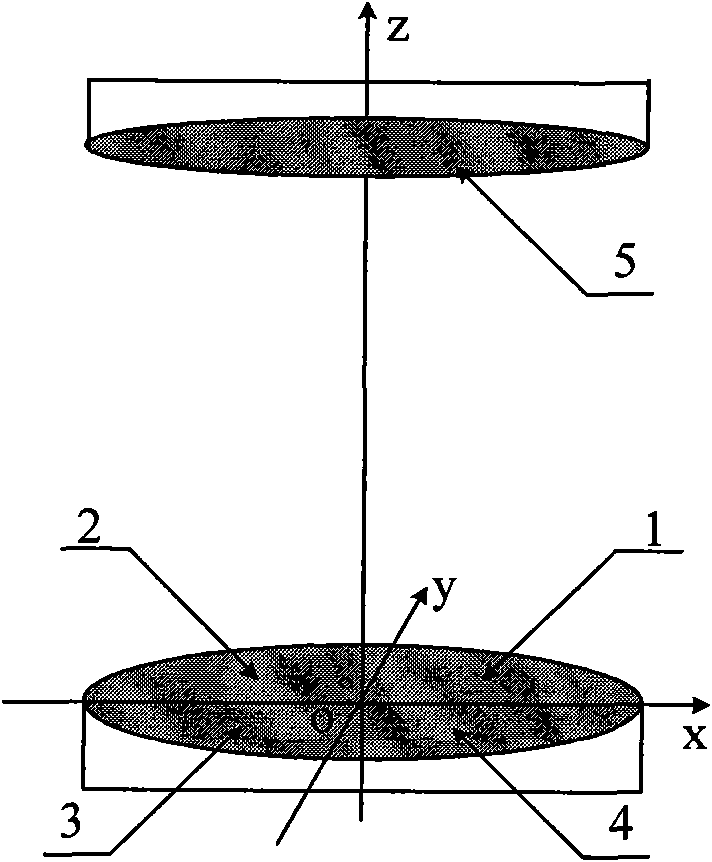
[0017] Such as figure 1 As shown, the present invention uses four identical plane quarter-circle fan-shaped ultrasonic transducers to form a complete circle, and controls the initial phases of the driving signals of the four transducers so that they are sequentially different by 90°. At this time, the four ultrasonic transducers The synthetic sound field of the transducer has a helical wavefront, and another planar circular ultrasonic transducer is arranged on the axis passing through the center of the circle and perpendicular to the plane where the circular surface is located, and its radiated sound wave propagation direction is the same as that of the four transducers mentioned above. The propagation direction is opposite, and the micro-components located in the interference superposition sound field of the four parallel transducers and the backpropagation transducer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More