Method and device for converting plane video to three-dimensional video
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology of stereoscopic video and planar video, which is applied in stereoscopic systems, image communication, electrical components, etc., and can solve problems such as difficulty in obtaining depth maps.
Active Publication Date: 2010-01-27
TSINGHUA UNIV
View PDF0 Cites 35 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
However, the acquisition of the depth map in this method is a rather difficult task
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
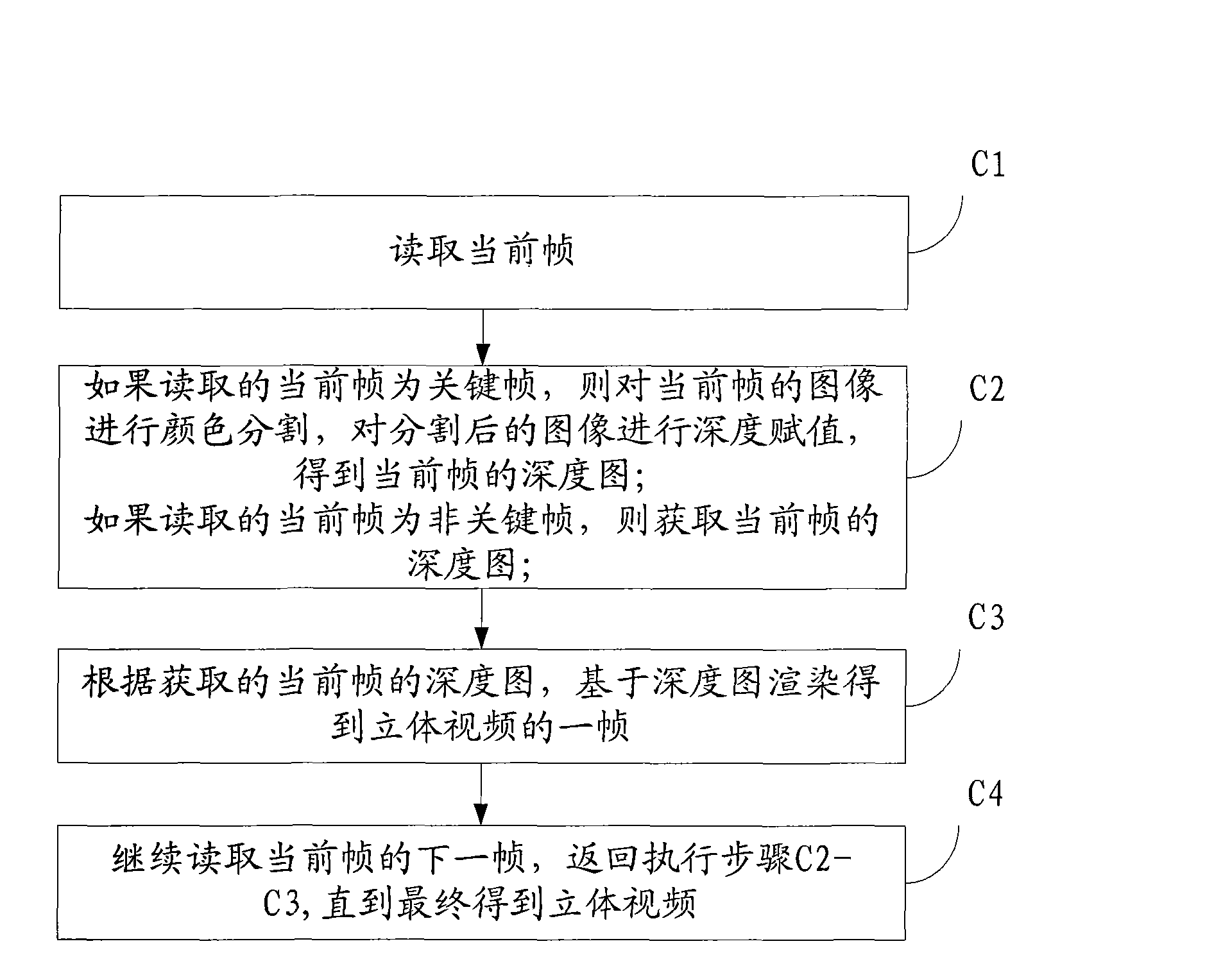
[0102]In order to realize the acquisition of the depth map corresponding to each frame image in a video sequence automatically, so as to better complete the task of converting plane video into stereoscopic video, the embodiment of the present invention provides a method, see figure 1 , the content of the method is as follows:
[0103] C1: read the current frame;
[0104] C2: If the current frame read is a key frame, perform color segmentation on the image of the current frame, assign depth to the segmented image, and obtain the depth map of the current frame;
[0105] If the read current frame is a non-key frame, get the depth map of the current frame;
[0106] C3: According to the obtained depth map of the current frame, a frame of the stereoscopic video is obtained based on the depth map rendering;
[0107] C4: Continue to read the next frame of the current frame, return to execute steps C2-C3, until the stereoscopic video is finally obtained.
[0108] In the method prov...
Embodiment 2
[0188] Corresponding to the above-mentioned method embodiment, the embodiment of the present invention provides a device for converting a flat video to a stereoscopic video, see Figure 9 , the device consists of:
[0189] A reading module 901, configured to read the current frame;
[0190] Segmentation module 902, for if the current frame read by reading module 901 is a key frame, then color segmentation is carried out to the image of current frame;
[0191] The first depth map acquisition module 903 is configured to perform depth assignment on the image divided by the segmentation module 902 to obtain a depth map of the current frame;
[0192] The second depth map acquisition module 904 is configured to acquire the depth map of the current frame if the current frame read by the reading module 901 is a non-key frame;
[0193] The rendering module 905, according to the depth map of the current frame obtained by the first depth map obtaining module 903 or the second depth map...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses a method and a device for converting a plane video to a three-dimensional video, belonging to the technical field of computer multimedia. The method comprises the following steps: C1: reading a current frame; C2: if the read current frame is a key frame, cutting colors of an image of the current frame, and assigning a depth value of the cut image to obtain a depth map of the current frame; and if the read current frame is a non-key frame, obtaining the depth map of the current frame; C 3: obtaining a frame of the three-dimensional video on the basis of the rendering of the depth map according to the obtained depth map of the current frame; C4: continuously reading a next frame of the current frame, and returning to perform the steps C2-C3 till the three-dimensional video is obtained. The invention can fully and automatically obtain the depth map corresponding to each frame image of one video sequence and better complete a task of converting the plane video into the three-dimensional video.
Description
technical field [0001] The invention belongs to the technical field of computer multimedia, and in particular relates to a method and a device for converting a flat video into a stereoscopic video. Background technique [0002] The appearance of stereoscopic video is undoubtedly a revolution in vision, and it has brought brand-new visual experience to people. However, with the continuous development of stereoscopic display technology and the rapid popularization of stereoscopic display devices, stereoscopic display film sources are seriously lacking. This situation presents an urgent requirement for us to be able to conveniently produce film sources for stereoscopic display. Of course, we can directly obtain stereoscopic video material by redesigning existing shooting equipment, such as using stereo cameras to simultaneously capture binoculars, but this method is far from meeting our requirements. On the one hand, it is because we hope to be able to use the huge library of ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More