

Industrial robot
A technology of industrial robots and motors, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as inability to properly correct deflection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
other Embodiment approach
[0096] The above-described embodiment is an example of a more preferable embodiment of the present invention, but the present invention is not limited thereto, and various modifications can be made without changing the gist of the present invention.
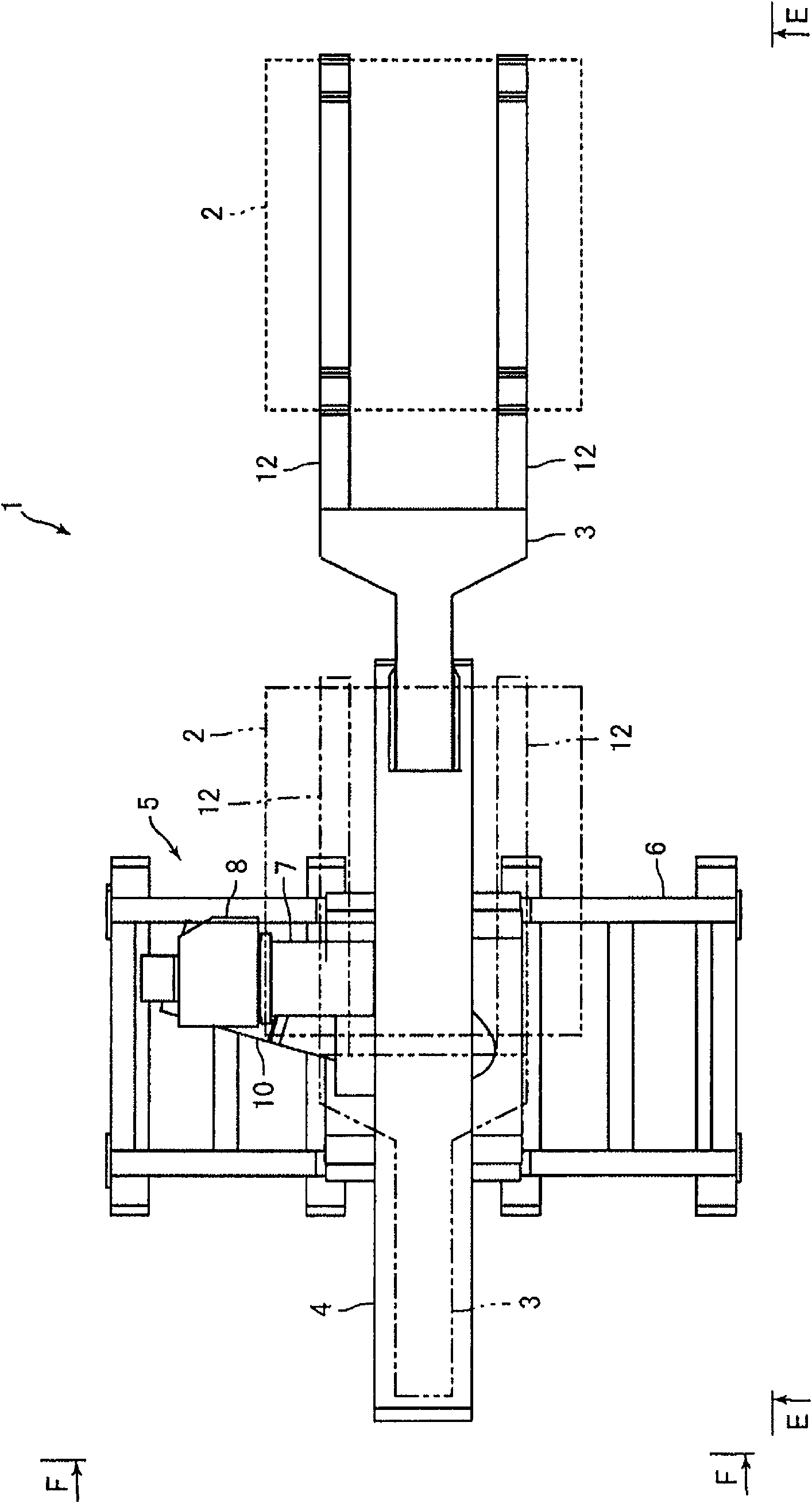
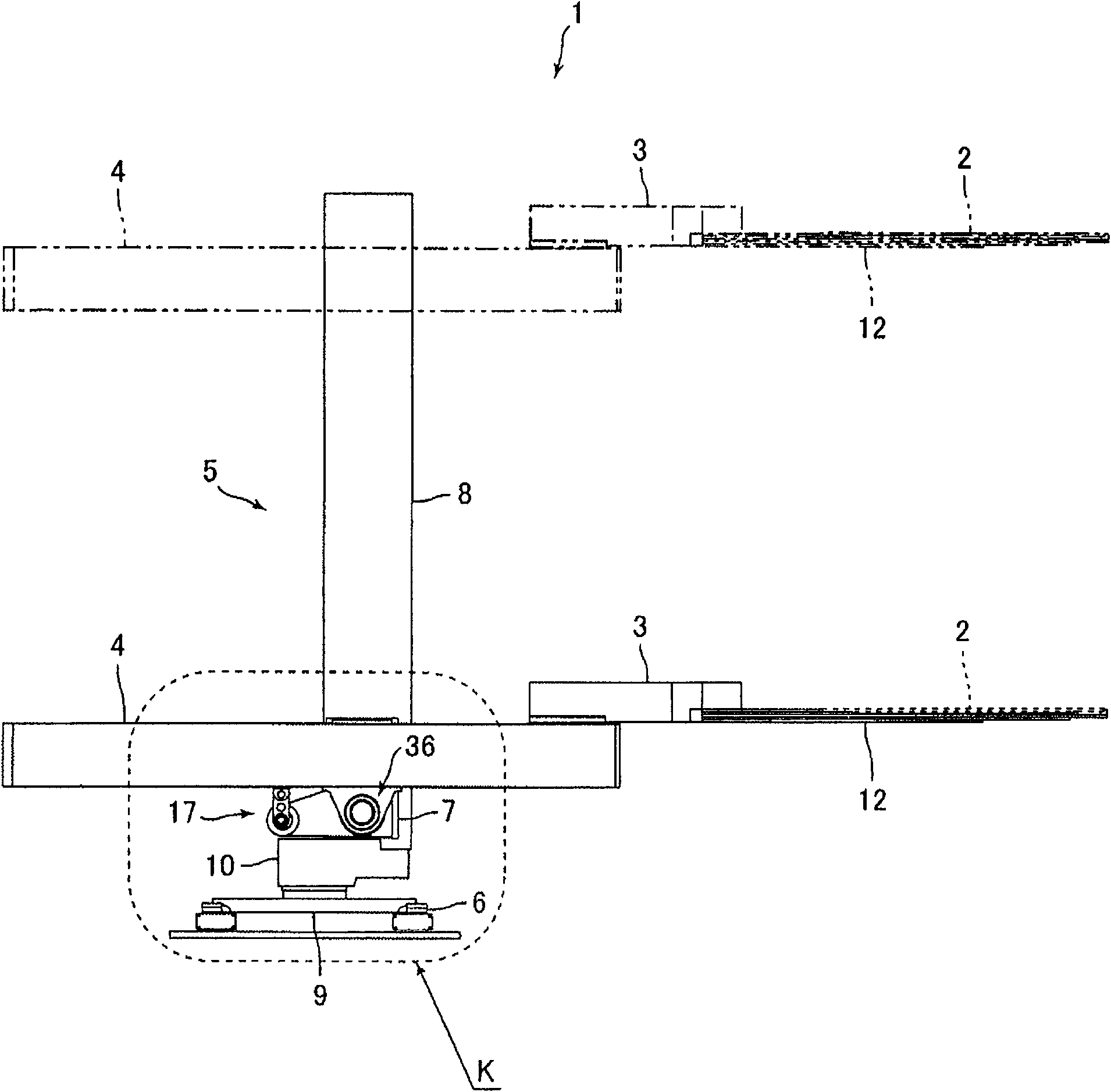
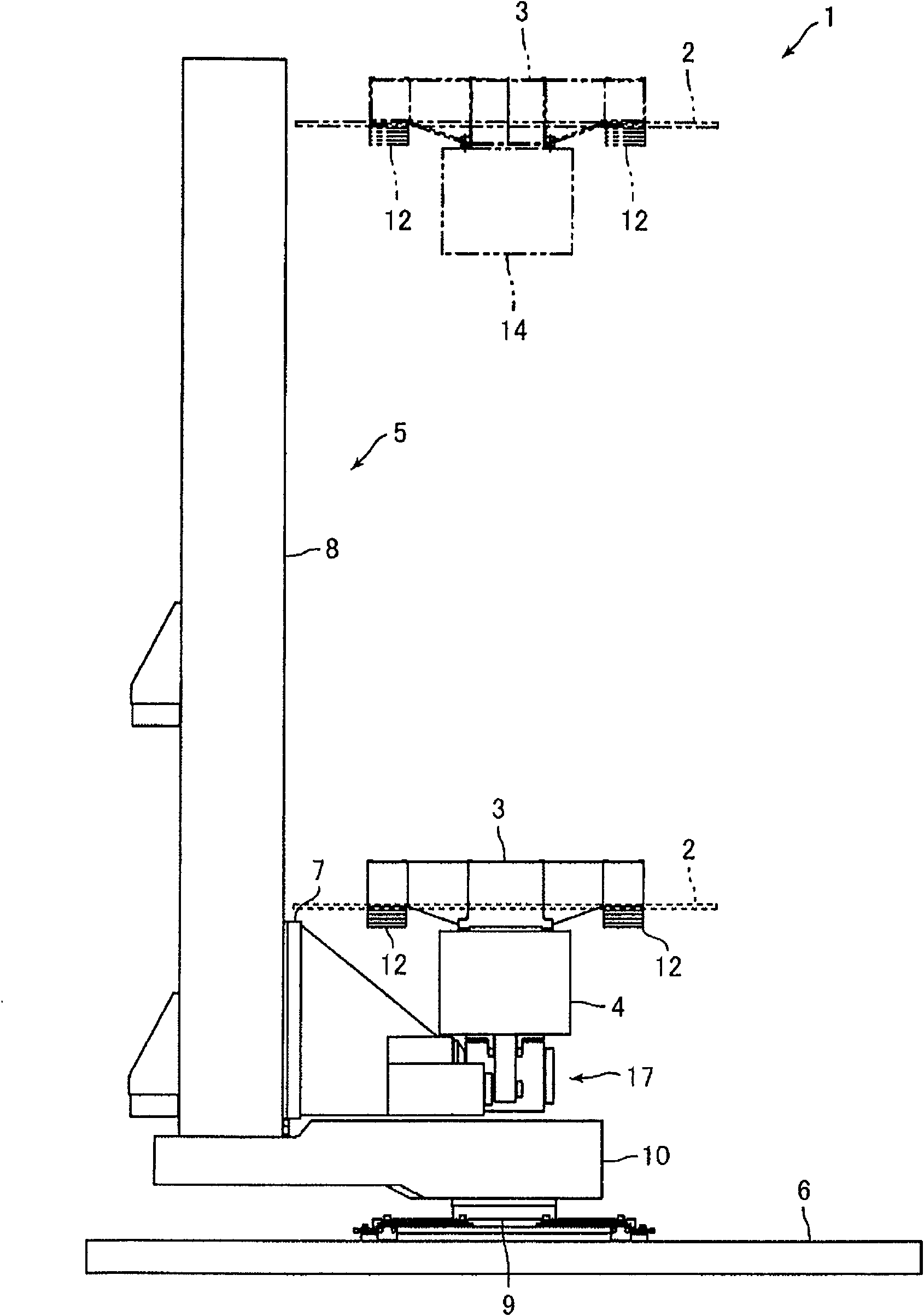
[0097] In the above-described embodiment, the inclination correction motor 37 and the eccentric shaft 39 are mounted on the supporting member 7, the mounting member 41 is fixed on the bottom surface of the frame 27 of the linear drive unit 4, and the fulcrum portion 36 is formed between the linear drive unit 4 and the supporting member. 7 connections. In addition to this, for example, a structure may be adopted in which the inclination correction motor 37 and the eccentric shaft 39 are mounted on the linear drive unit 4, the mounting member 41 is fixed to the bottom surface of the hand 3, and the fulcrum portion 36 is formed on the linear drive unit. 4 and the link between the hand 3.
[0098] In the above-described embodiment, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More