

Sensor node positioning method
A sensor node and positioning method technology, applied in electrical components, wireless communication, network topology and other directions, can solve the problems of high computational resource consumption of nodes to be located, algorithms falling into local optimal solutions, low node positioning accuracy, etc. The effect of resource consumption, increased speed, and reduced burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
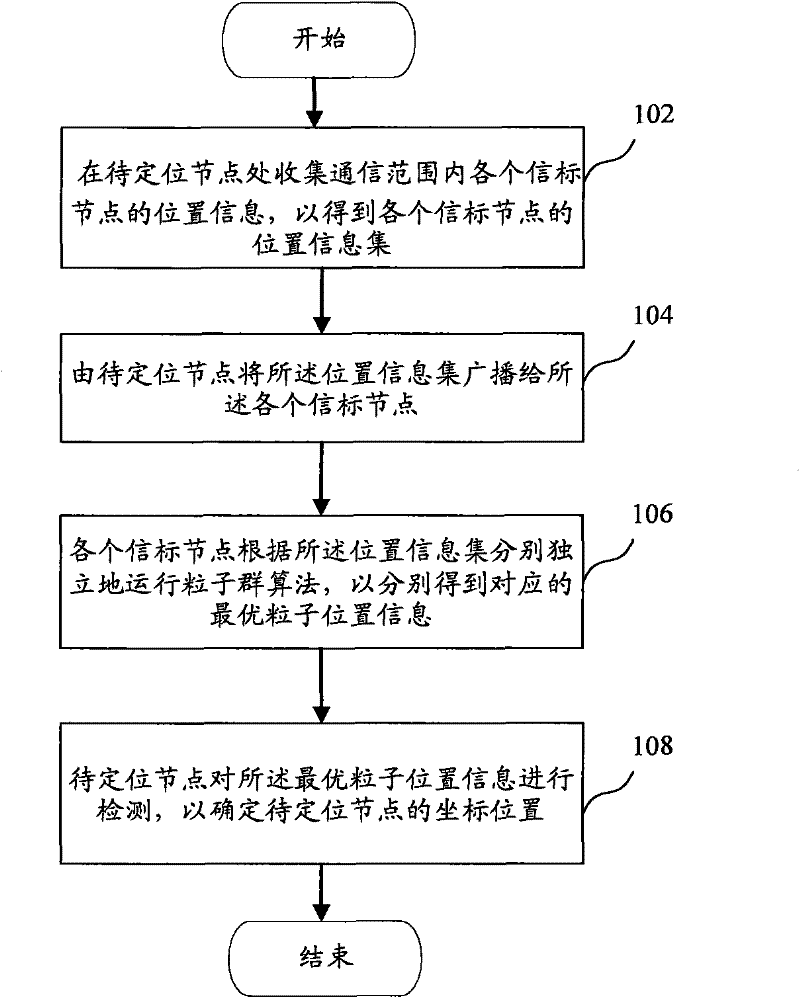
[0043] Embodiment 1: After receiving the coordinates of the optimal particles of all beacon nodes, the node to be positioned calculates the corresponding optimal particle position information of each beacon node according to the optimal particle position information and the evaluation function F. F value.
[0044] Then, find out all the particles satisfying F<ε. The threshold ε can be selected according to actual conditions, such as experimental results, and the threshold ε is generally selected to be between 10 and 30.
[0045] Finally, take the coordinate average of the selected optimal particle position information as the coordinate position of the node to be located. In one embodiment, the position of the node to be positioned is obtained by the following formula:
[0046] x = Σ i = ...
Embodiment 2
[0048] Embodiment 2: After receiving the coordinates of the optimal particles of all beacon nodes, the node to be positioned calculates the corresponding optimal particle position information of each beacon node according to the optimal particle position information and the evaluation function F. F value. Then, select the minimum value of F value corresponding to each optimal particle position information as the coordinate position of the node to be located. That is, use the particle coordinates with the smallest F value as the coordinates of the nodes to be located.
[0049] From the experimental data, it can be concluded that compared to using the particle coordinate position with the smallest F value as the position of the node to be located in the embodiment 2, the average value of these particle coordinate positions used in the embodiment 1 will be more accurate.
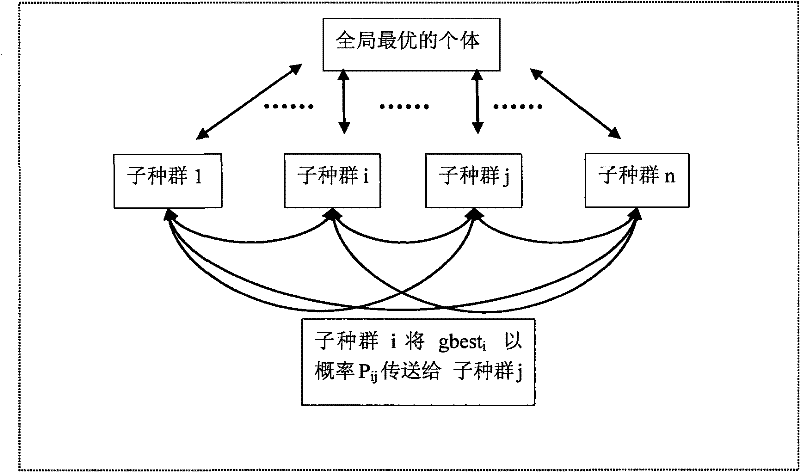
[0050] In step 106, each beacon node corresponds to the obtained phased global optimal particles, and there...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More