

Mobile mechanical arm
A technology for moving manipulators and manipulators, applied in the field of robotics, can solve problems such as inapplicability of remote control, limited operating space for operators, and lack of visual functions for operators
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
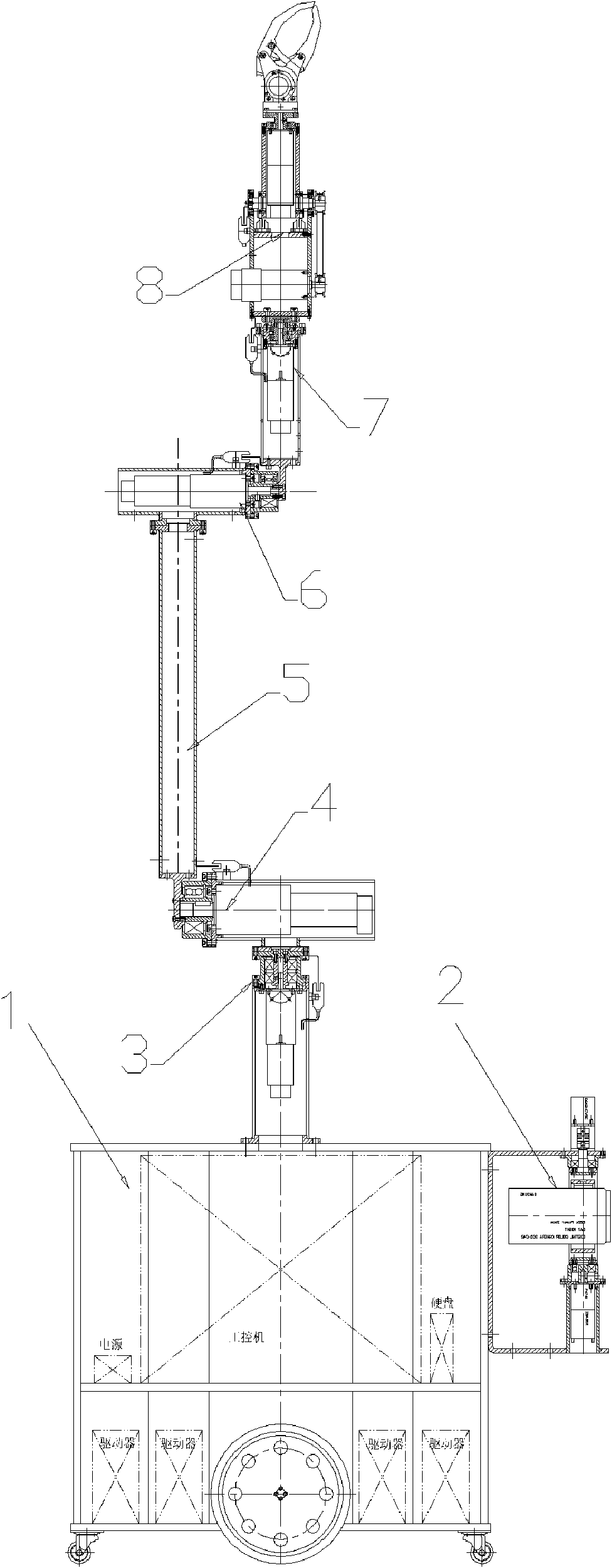
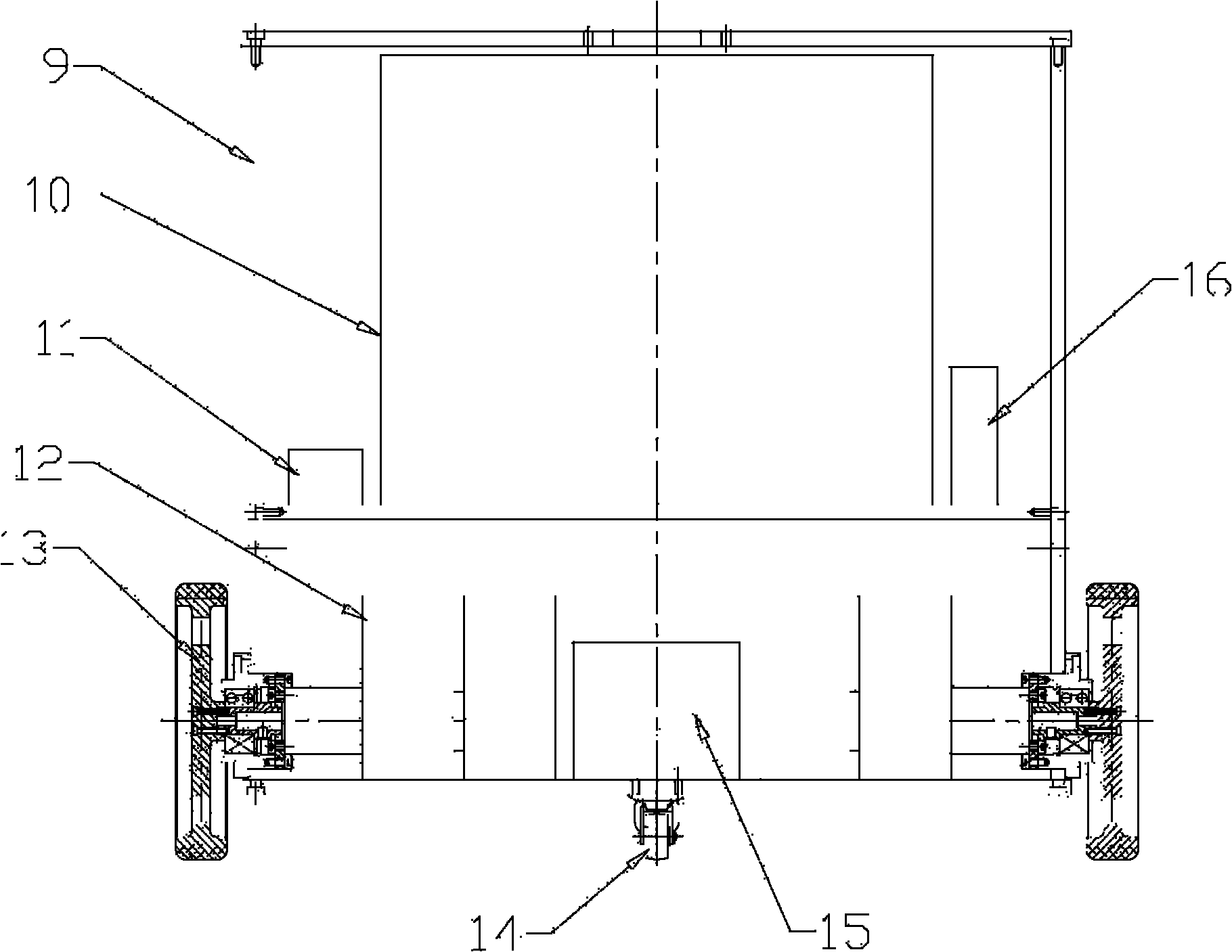
[0017] Such as figure 1 As mentioned above, this example includes: a mobile platform 1, a two-dimensional rotating platform 2, and a mechanical arm 3-8, wherein: the mechanical arm 3-8 and the two-dimensional rotating platform 2 are respectively fixed on the mobile platform 1.
[0018] The mechanical arm includes: a waist joint 3 , a shoulder joint 4 , a big arm 5 , an elbow joint 6 , a small arm 7 , and a wrist joint 8 . Among them: the waist joint 3 has one degree of freedom of rotation, the shoulder joint 4 and the elbow joint 6 have one degree of freedom of swing respectively, the forearm 7 has one degree of f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More