

Four-DOF (degree of freedom) rehabilitation training robot with adjustable posture
A rehabilitation training and degree of freedom technology, applied in the field of rehabilitation training robots, can solve problems such as high cost, easy failure, and failure to meet the needs of patients' rehabilitation training.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
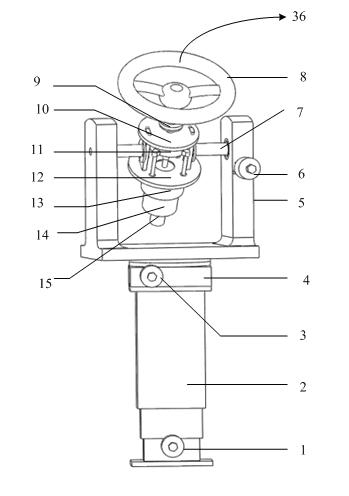
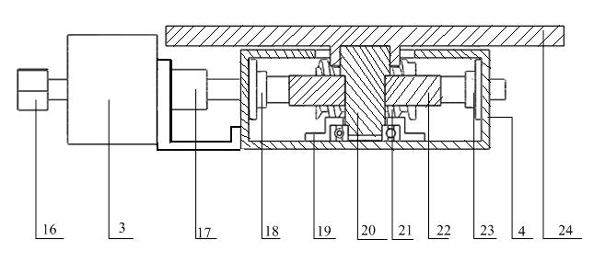
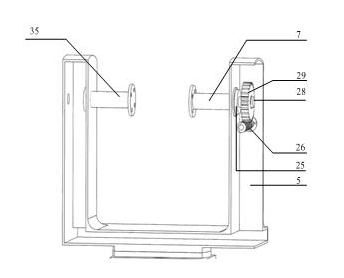
[0020] A four-degree-of-freedom rehabilitation training robot with adjustable posture includes a lifting base 2, a U-shaped frame 5 and a motion output assembly 36. The U-shaped frame 5 is located above the lifting base 2 and the U-shaped frame 5 passes through the first rotating mechanism. It is rotationally connected with the lifting base 2, and the motion output assembly 36 is rotationally connected with the U-shaped frame 5 through the second rotating mechanism. The first worm gear 22 and the first worm screw 21 on the support 4 are provided with the second stepping motor 3 on the first support 4, and the output shaft of the second stepping motor 3 is connected with the first worm screw 21, and is connected to the first The first rotating shaft 20 of the worm wheel 22 is provided with a turntable 24, and the turntable 24 is connected with the U-shaped frame 5. The second rotating mechanism includes a second worm wheel 29 and a second worm 26 which are arranged on the U-shap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More