

Sitting exoskeleton lower limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of medical rehabilitation, can solve the problems of complex operation, high cost, unsuitable promotion, etc., and achieve the effects of comfortable exercise process, compact design structure, and large rotation range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] The embodiments of the present invention will be described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention. Detailed implementation modes and specific operation procedures are given, but the protection scope of the present invention is not limited to the following implementations. example.
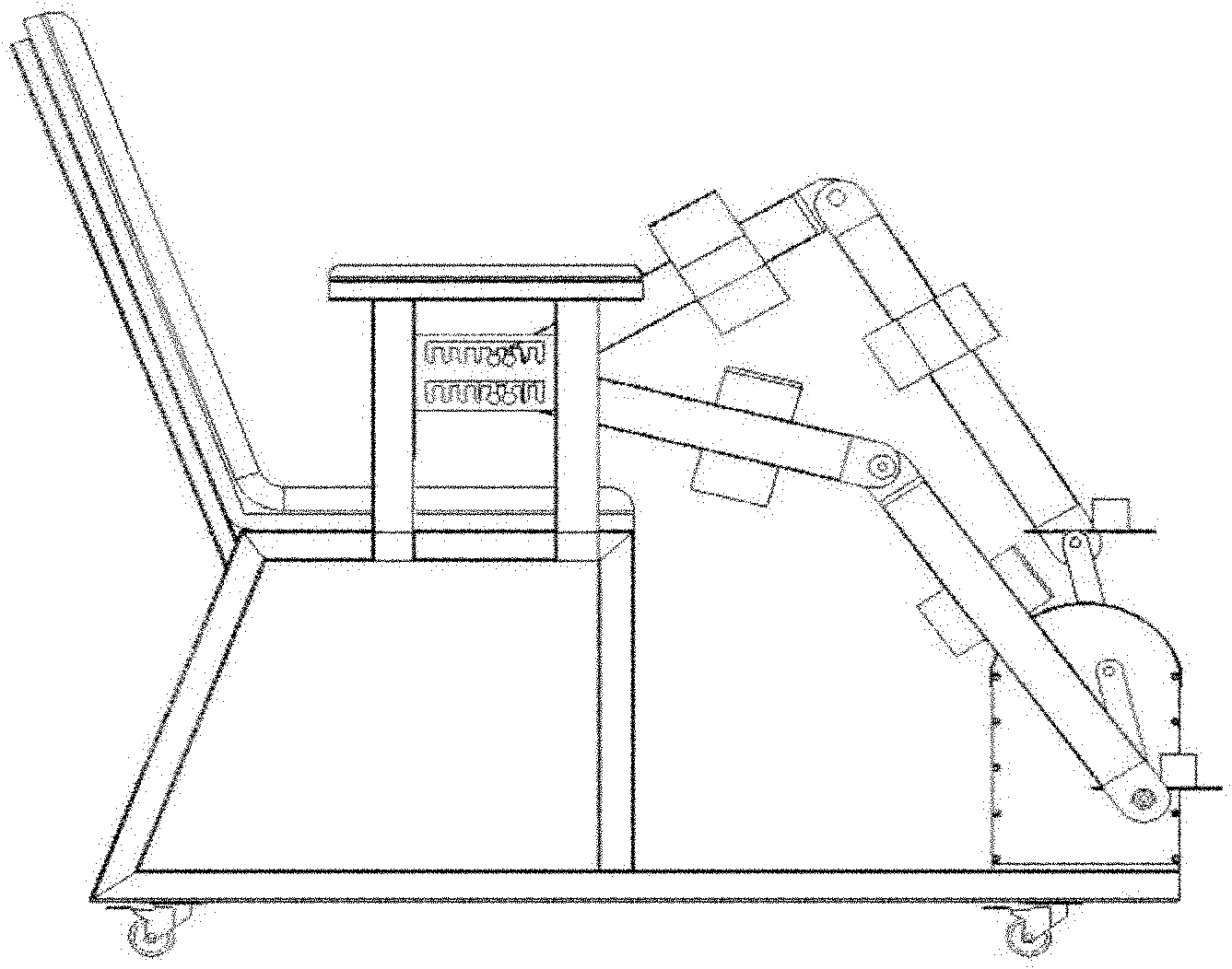
[0021] Such as figure 1 , figure 2 As shown, this embodiment includes: a sitting auxiliary mechanism 1, a lower limb rehabilitation mechanism 2, and an exoskeleton shield mechanism 3. The sitting auxiliary mechanism 1 is connected to the lower limb rehabilitation mechanism 2, and the exoskeleton shield mechanism 3 is connected to the sitting The auxiliary mechanism 1 and the lower limb rehabilitation mechanism 2 are connected.
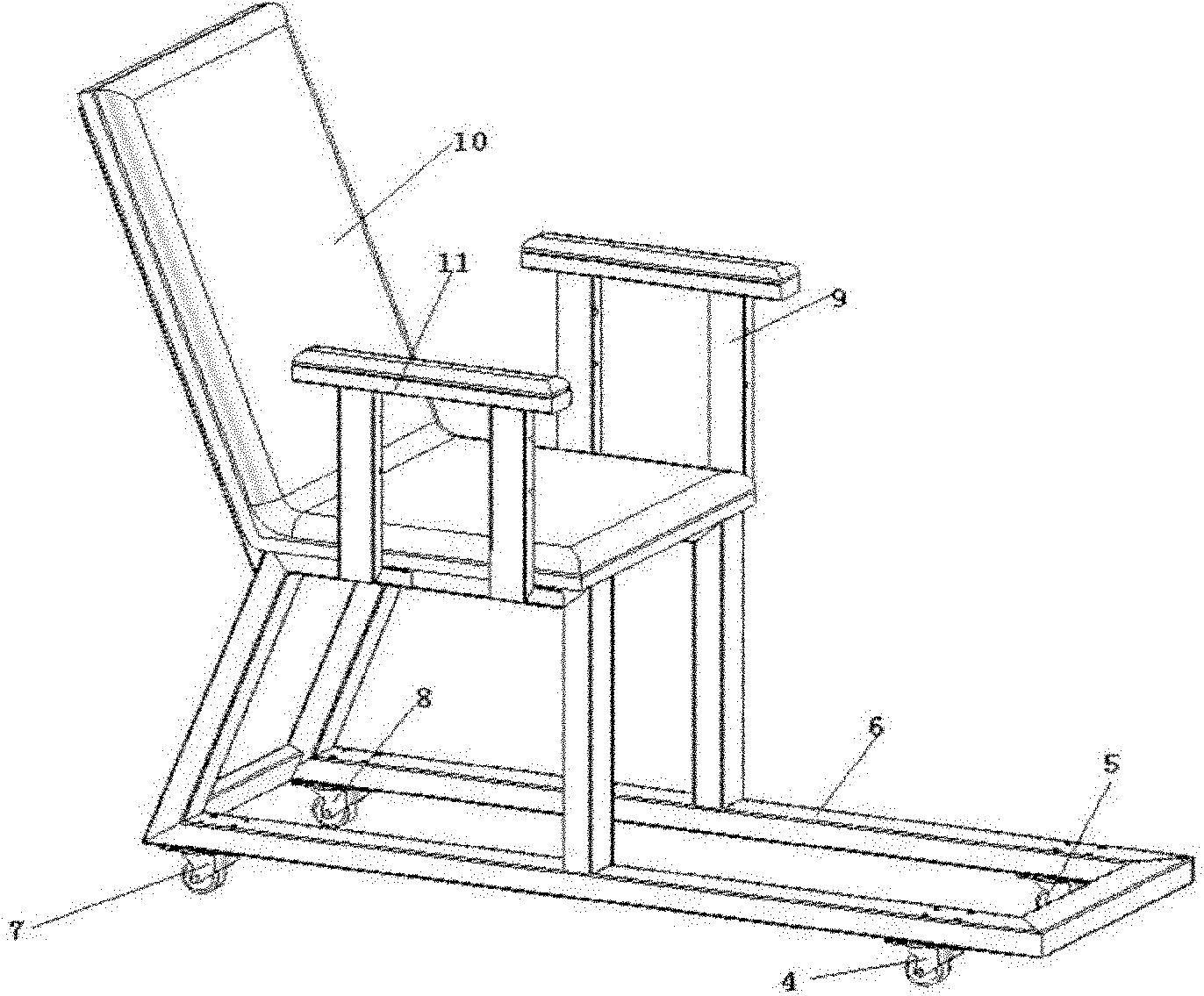
[0022] Such as image 3 As shown, the sitting auxiliary mechanism 1 includes: a first universal wheel with brake 4, a second universal wheel with brake 5, a chair frame 6, a third universal wheel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More