

Wheel barycenter distortion angle observation method integrated with Kalman filtering and acceleration integral
A center-of-mass side-slip and Kalman filter technology, applied in the field of real-time observation of vehicle status, can solve problems such as being unsuitable for large-scale popularization and application, expensive sensor equipment, and large cumulative error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0058] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
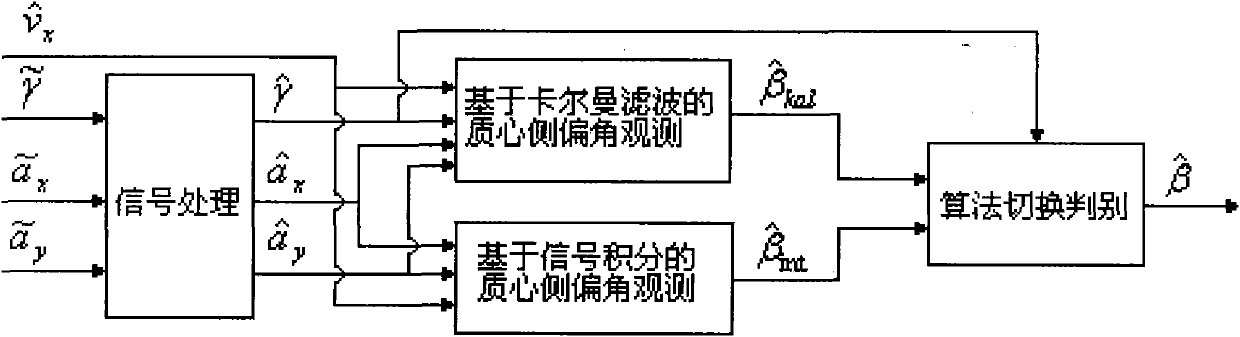
[0059] The center-of-mass sideslip angle observation system of the present invention is established based on conventional vehicle speed sensors, longitudinal acceleration sensors, lateral acceleration sensors, yaw angular velocity sensors and controllers. The controller receives signals from the vehicle speed sensor, longitudinal acceleration sensor, lateral acceleration sensor and yaw rate sensor, performs signal processing, and observes the sideslip angle of the center of mass. ,
[0060] The center of mass sideslip angle observation method of the present invention is as follows: figure 1 As shown, the following steps are introduced:
[0061] 1. Through the longitudinal acceleration sensor, lateral acceleration sensor and yaw angular velocity sensor, the original signal is respectively obtained: longitudinal acceleration lateral acceleration ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More