

Biped walking four-bar mechanism
A four-bar mechanism and connecting rod technology, applied in the field of three-degree-of-freedom bipedal mobile mechanism, can solve problems such as complexity, single walking posture, high requirements for working position and posture, and achieve low operating power consumption, light weight, and control simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
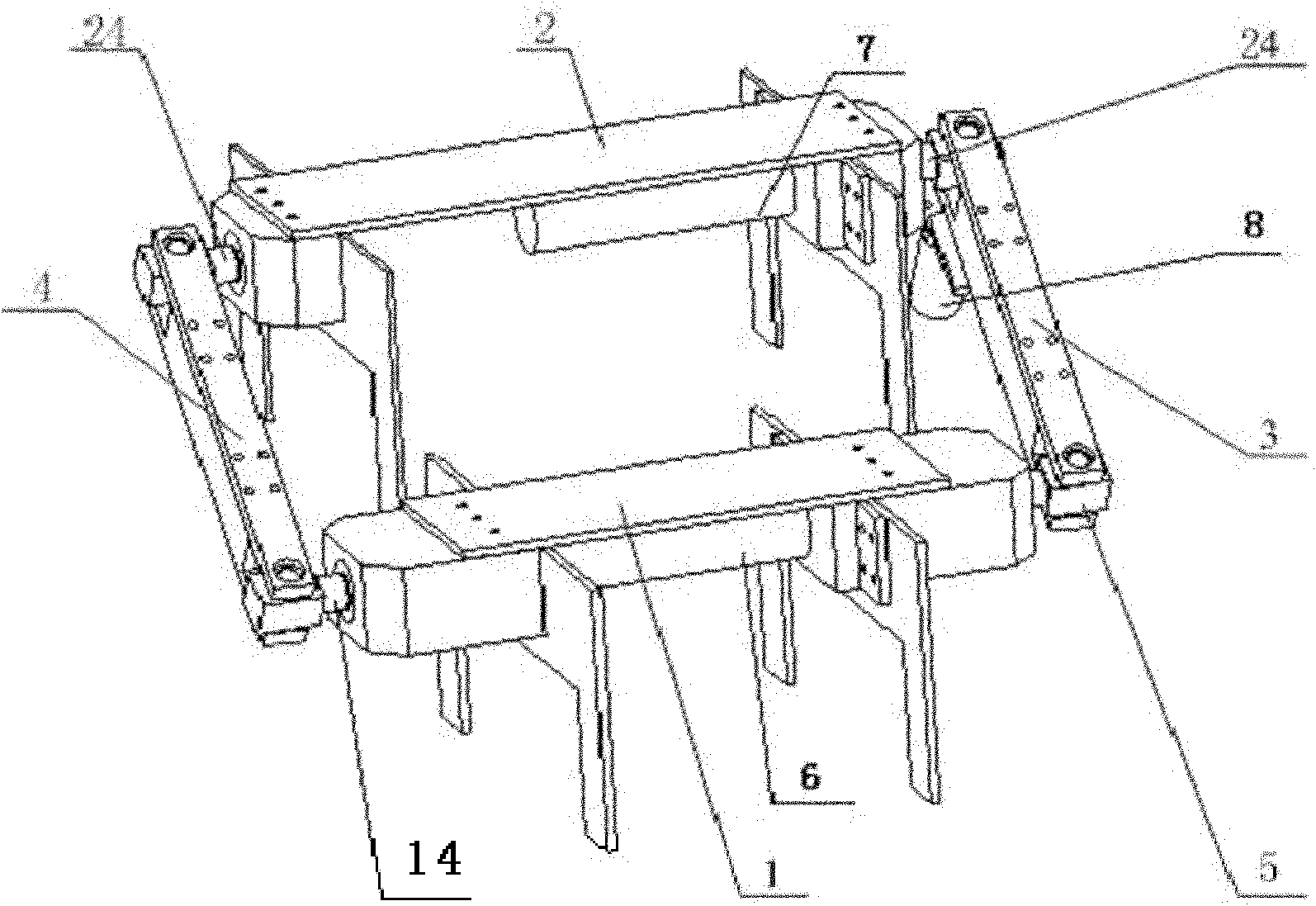
[0023] Such as figure 1 As shown, the present invention comprises parallel moving foot 1, moving foot 2, connecting rod 3, connecting rod 4, described moving foot 1, connecting rod 3, moving foot 2 and connecting rod 4 are sequentially connected by universal joint 5, constitute Single-loop closed parallel four-bar mechanism; the moving foot 1 is fixed with a motor 6 parallel to it, the moving foot 2 is fixed with a motor 7 parallel to it, and the connecting rod 3 is provided at the end connected to the moving foot 2. There is a motor 8 perpendicular thereto.
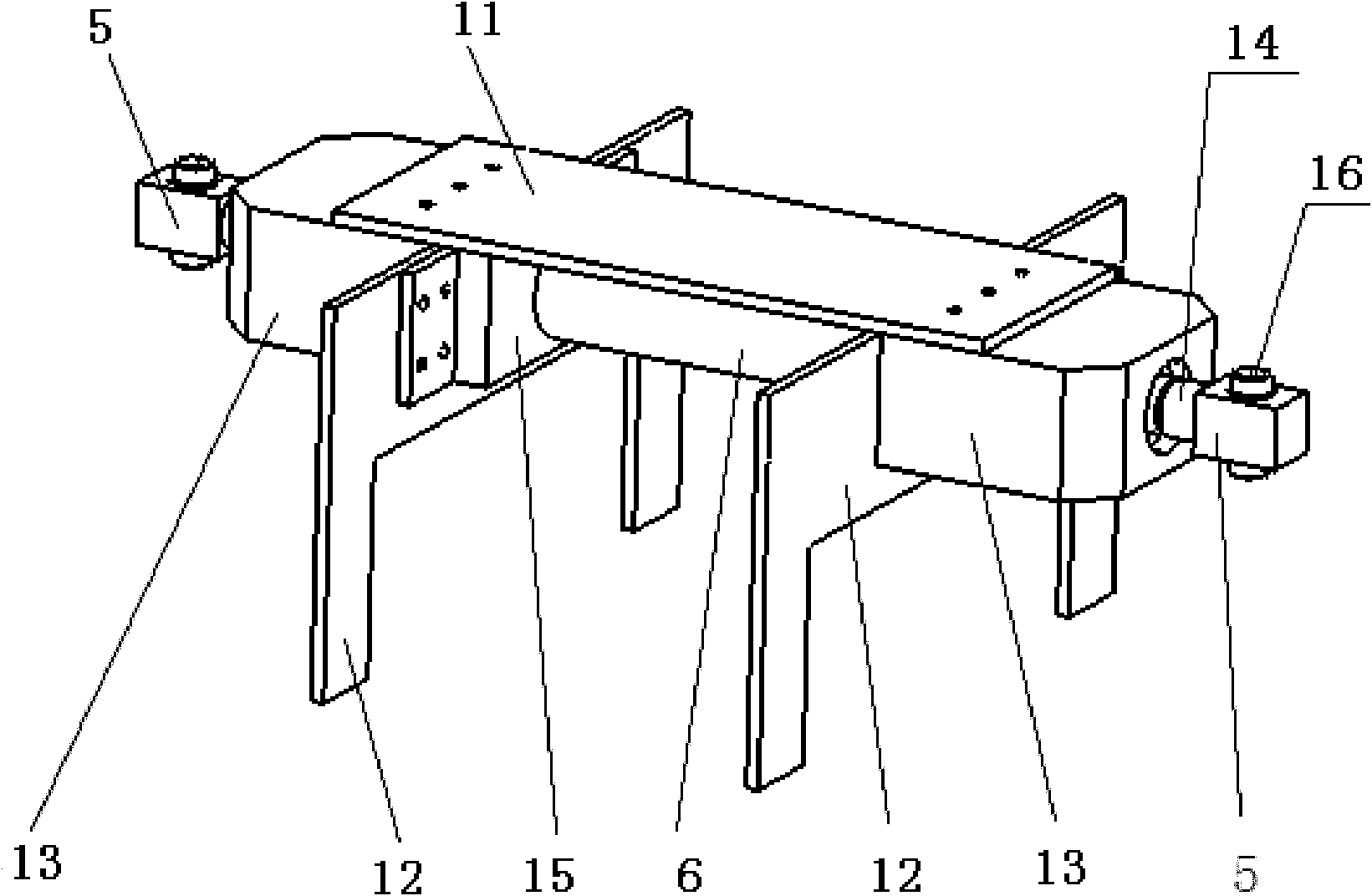
[0024] Such as figure 2 As shown, the mobile foot 1 includes a connection plate 11, a support plate 12, and a connection block 13. The two ends of the connection plate 11 are vertically fixed to the support plate 12 through the connection block 13, and the connection block 13 is parallel to the connection plate 11. The rotating shaft 14 is connected with the universal joint 5, and the universal joint 5 is provided wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More