

Parallel mechanism capable of realizing four-degree-of-freedom movement
A technology with degrees of freedom and movement, applied in the field of robotics, can solve problems such as inflexible driving methods, uneven force conditions, and unfavorable mechanisms for smooth operation, so as to avoid uneven force, good rigidity and stability, and uniform force Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
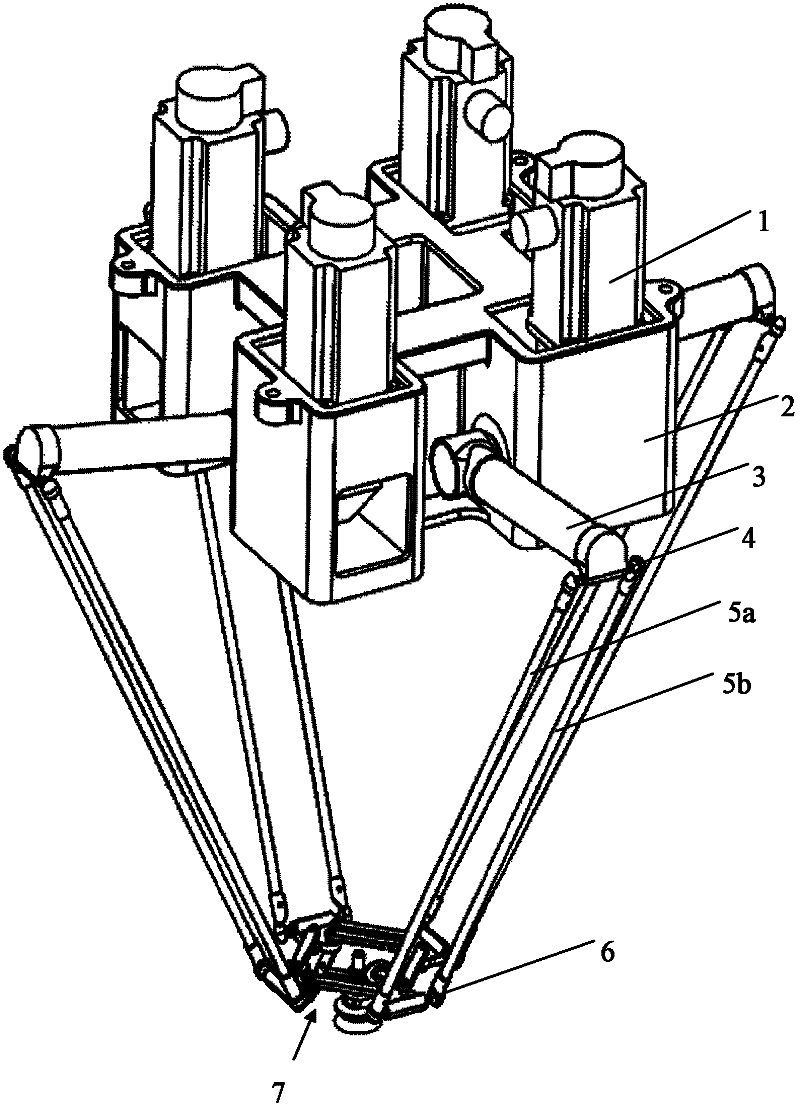
[0017] see Figure 1 ~ Figure 3 , the present invention is a parallel mechanism that can realize four-degree-of-freedom movement, including a fixed frame 2, a moving platform 7, and four branch chains with the same structure symmetrically arranged between the fixed frame 2 and the moving platform 7; The branch chain is composed of a near frame rod 3, an upper connecting shaft 4, two mutually parallel and equal-length far frame rods 5a and a far frame rod 5b. One end of the near frame rod 3 is affixed to the output end of the drive device 1 fixed on the fixed mount 2, and the other end of the near frame rod 3 is affixed to the upper connecting shaft 4; the far frame rod 5a and the far frame rod 5b One end of each branch is respectively ball-hinged with the upper connecting shaft 4 through a ball hinge, and the other end is respectively ball-hinged with the lower connecting shaft 6 affixed to the moving platform 7 through a ball hinge; the lower connection on each branch chain ...
Embodiment 2
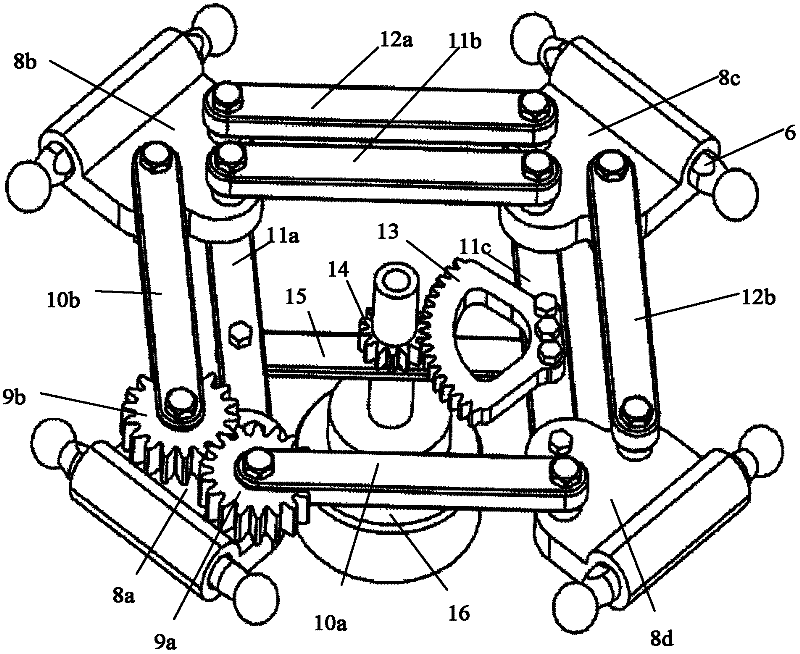
[0023] see Figure 4 , its overall structure is the same as that of Embodiment 1. The difference from Embodiment 1 is that the moving platform adopts a reconfigured structure of the moving platform of Embodiment 1. The fixed first angled plate 8a, the second angled plate 8b, the third angled plate 8c and the fourth angled plate 8d, the first angled plate 8a, the second angled plate 8b, the third angled plate 8c and the fourth angled plate 8d are clockwise Arrangement; the first corner plate 8a is provided with a first corner dividing mechanism, and the first corner dividing mechanism includes a first gear 9a, a second gear 9b, a first corner dividing link 10a and a second corner dividing link 10b, the first gear 9a and the second gear 9b are symmetrically arranged along the center line of the first angle plate 8a, and are connected with the first angle plate 8a through a rotating pair; the first angle-dividing connecting rod 10a One end of one end is affixed to the first gear...
Embodiment 3
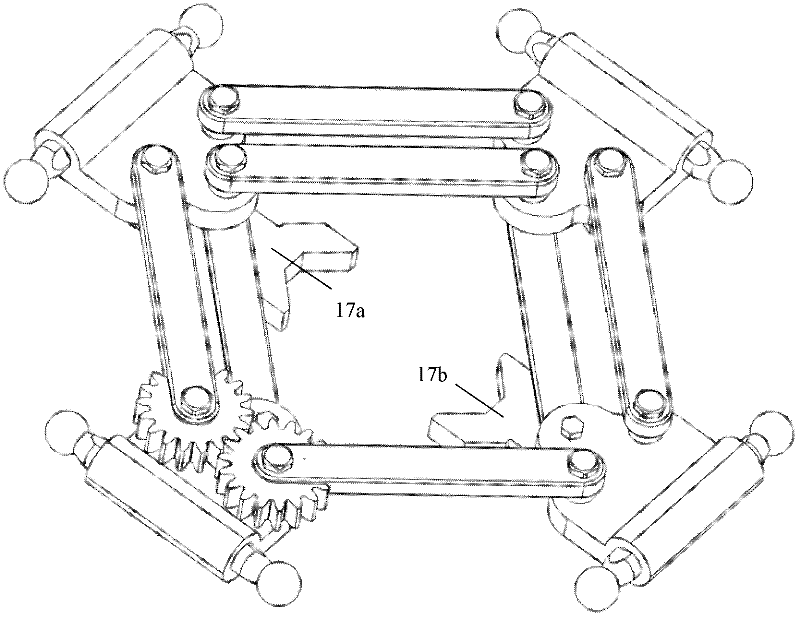
[0026] see Figure 5, its overall structure is the same as that of Embodiment 1. The difference from Embodiment 1 is that the moving platform adopts a reconfigured structure of the moving platform of Embodiment 1. The fixed first angled plate 8a, the second angled plate 8b, the third angled plate 8c and the fourth angled plate 8d, the first angled plate 8a, the second angled plate 8b, the third angled plate 8c and the fourth angled plate 8d are clockwise Arrangement; the first corner plate 8a is provided with a first corner dividing mechanism, and the first corner dividing mechanism includes a first gear 9a, a second gear 9b, a first corner dividing link 10a and a second corner dividing link 10b, the first gear 9a and the second gear 9b mesh with each other and are arranged symmetrically along the center line of the first angle plate 8a, and are connected with the first angle plate 8a through a rotating pair; One end of the connecting rod 10a is affixed to the first gear 9a, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More