

Modularized series joint of collaborative robot
A modular and robotic technology, applied in the direction of manipulators, manufacturing tools, joints, etc., to achieve the effect of compact structure, sensitive feedback, and reduced outer diameter and length
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
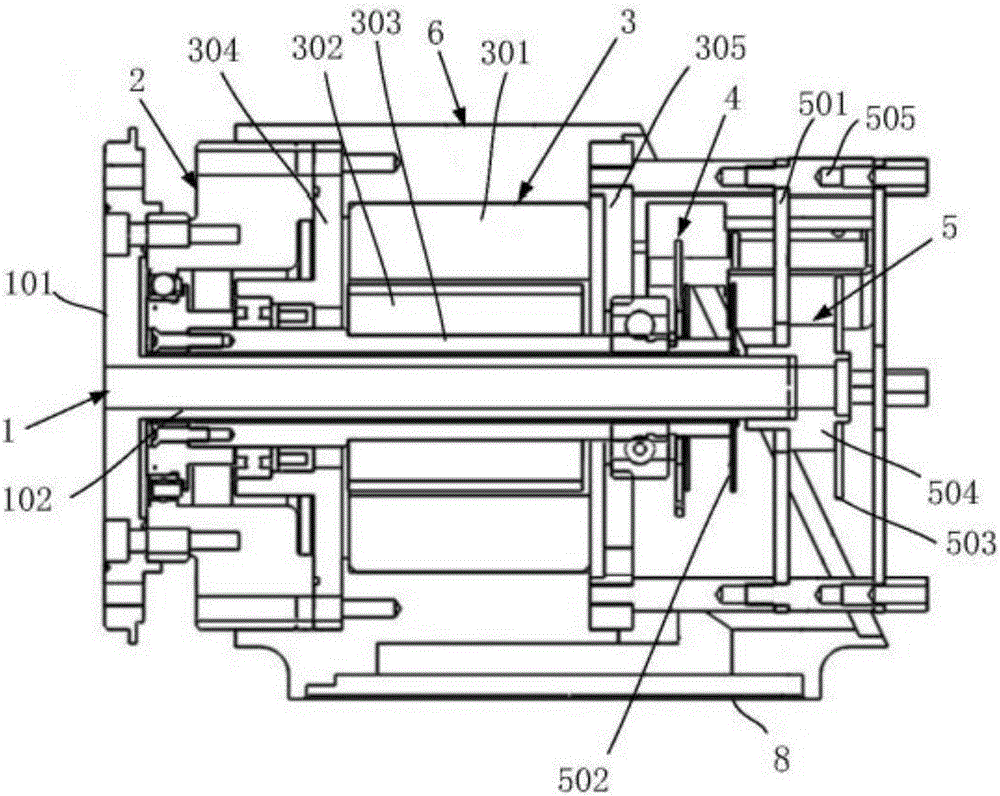
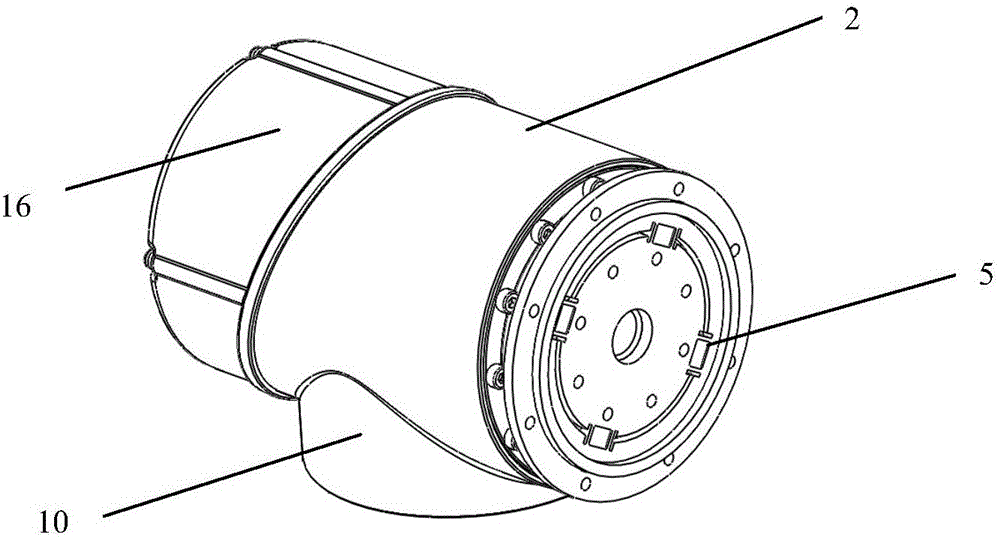
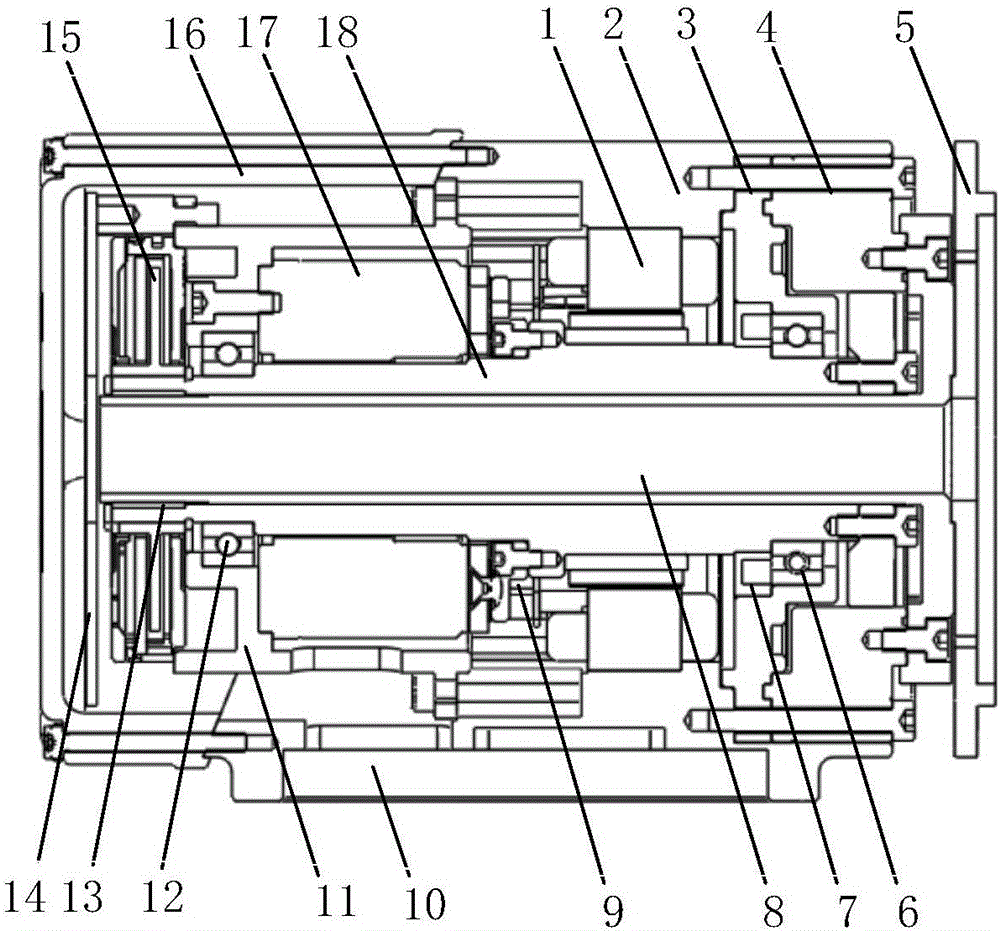
[0040] see Figure 2 to Figure 10 , a modular series joint of a collaborative robot described in a preferred embodiment of the present invention includes a joint housing 2 and a hollow motor 1 placed therein, a harmonic reducer 4, an input shaft 18, an output shaft 8, a torque Sensor 5 , brake 17 , absolute encoder 15 , driver 14 , and harmonic reducer 4 , hollow motor 1 , brake 17 , absolute encoder 15 and driver 14 are connected in series on input shaft 18 in sequence. Wherein the joint housing 2 is provided with a front flange 3 and a rear flange 11 supporting the input shaft 18, and the input shaft 18 is connected with the front flange 3 and the rear flange 11 through...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More