

Path planning method for multi-robots based on ad Hoc network
A multi-robot and path planning technology, applied in network topology, road network navigator, electrical components, etc., can solve the problems of limited information collection ability and limited information, and achieve the goal of reducing communication burden, solving resource allocation, and better resource allocation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
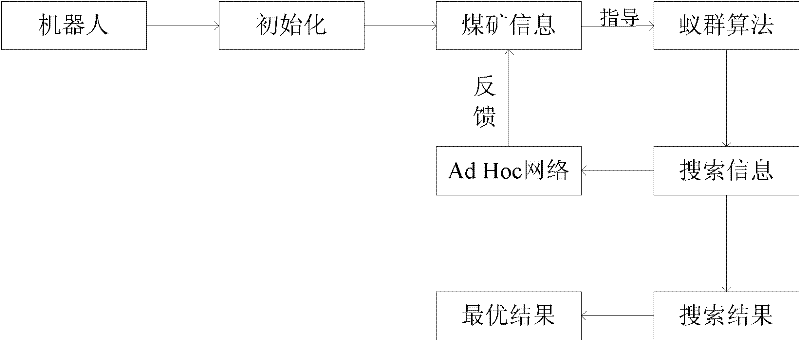
[0036] The multi-robot path planning method based on the Ad Hoc network provided by the invention comprises the following steps:
[0037] Step 1: Obtain the geographic information of the robot's environment, initialize the working state of each robot, and set the robot's preset search path. The environment of the robot is a coal mine;
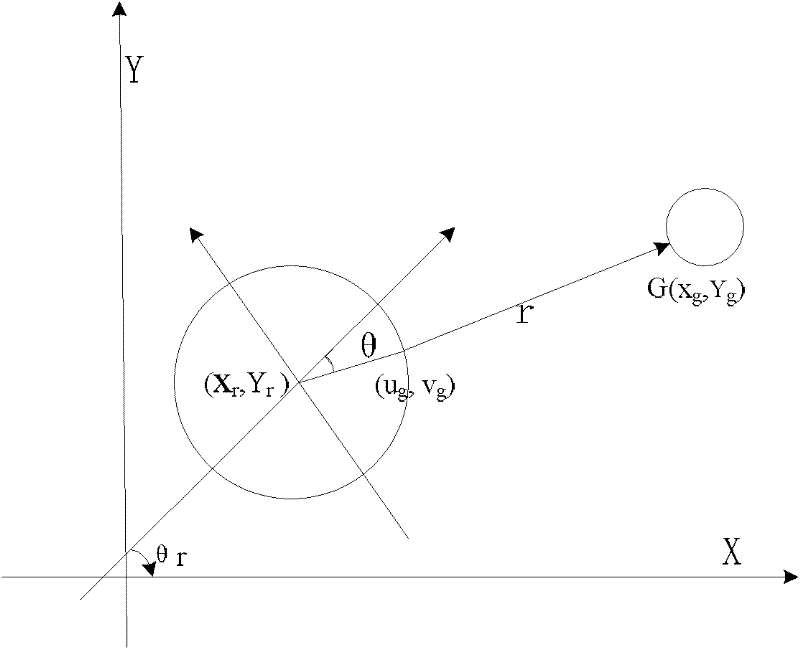
[0038] Step 2: During the forward search process of the robot, the robot detects the environmental information through the sensor, measures the coordinate position of the surrounding obstacles, and obtains the environmental information in the current state. The sensors of the robot include sonar, camera, gas sensor, temperature One or mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More