

Logical reasoning-based rapid collision detection method in virtual operation simulation
A technology of collision detection and virtual operation, which is applied in the field of collision detection and can solve the problems of slow running speed and inconsistent contact between two objects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The implementation of the fast collision detection method based on logical reasoning in the virtual operation simulation of the present invention will be described in detail below in conjunction with the accompanying drawings.
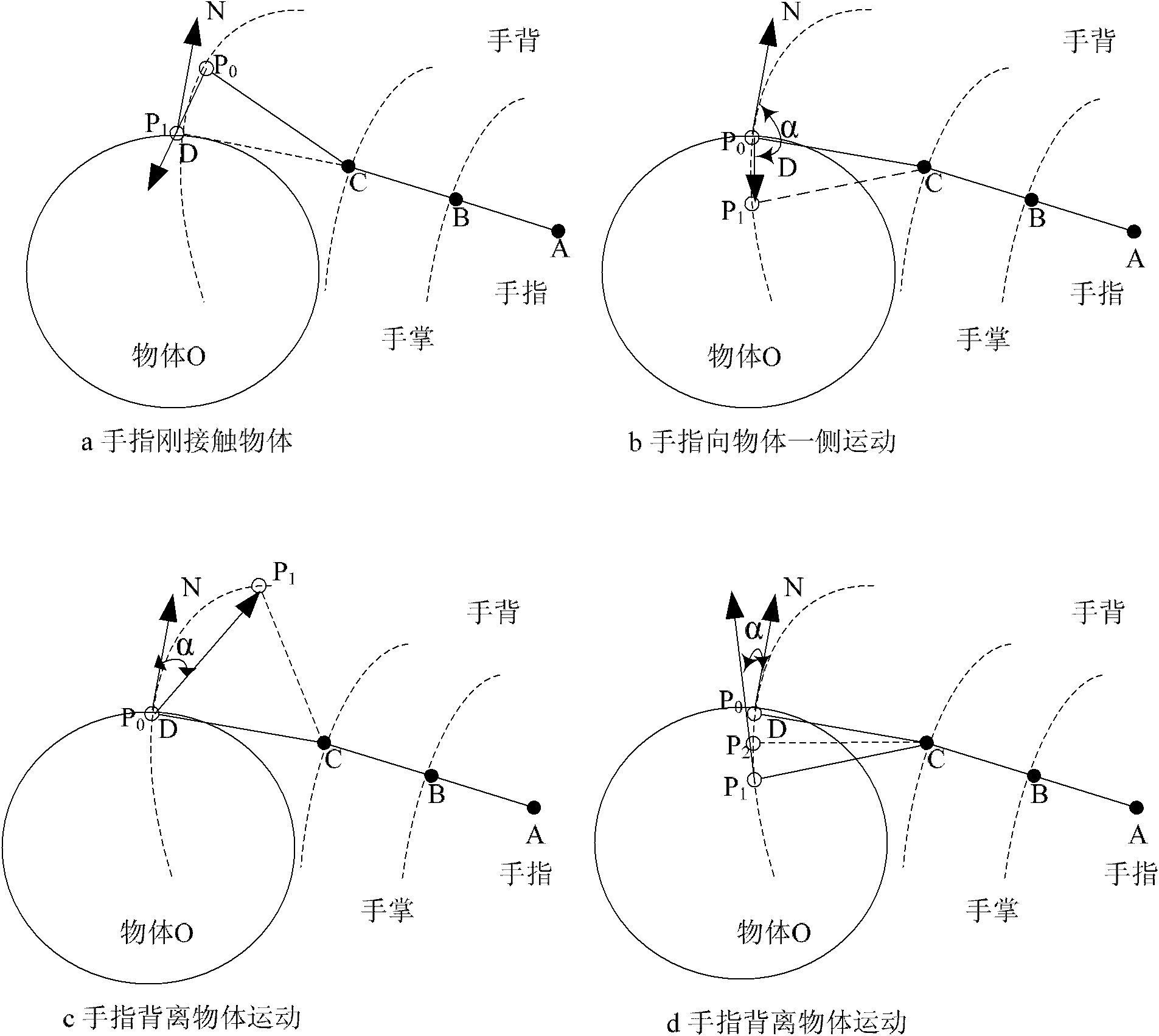
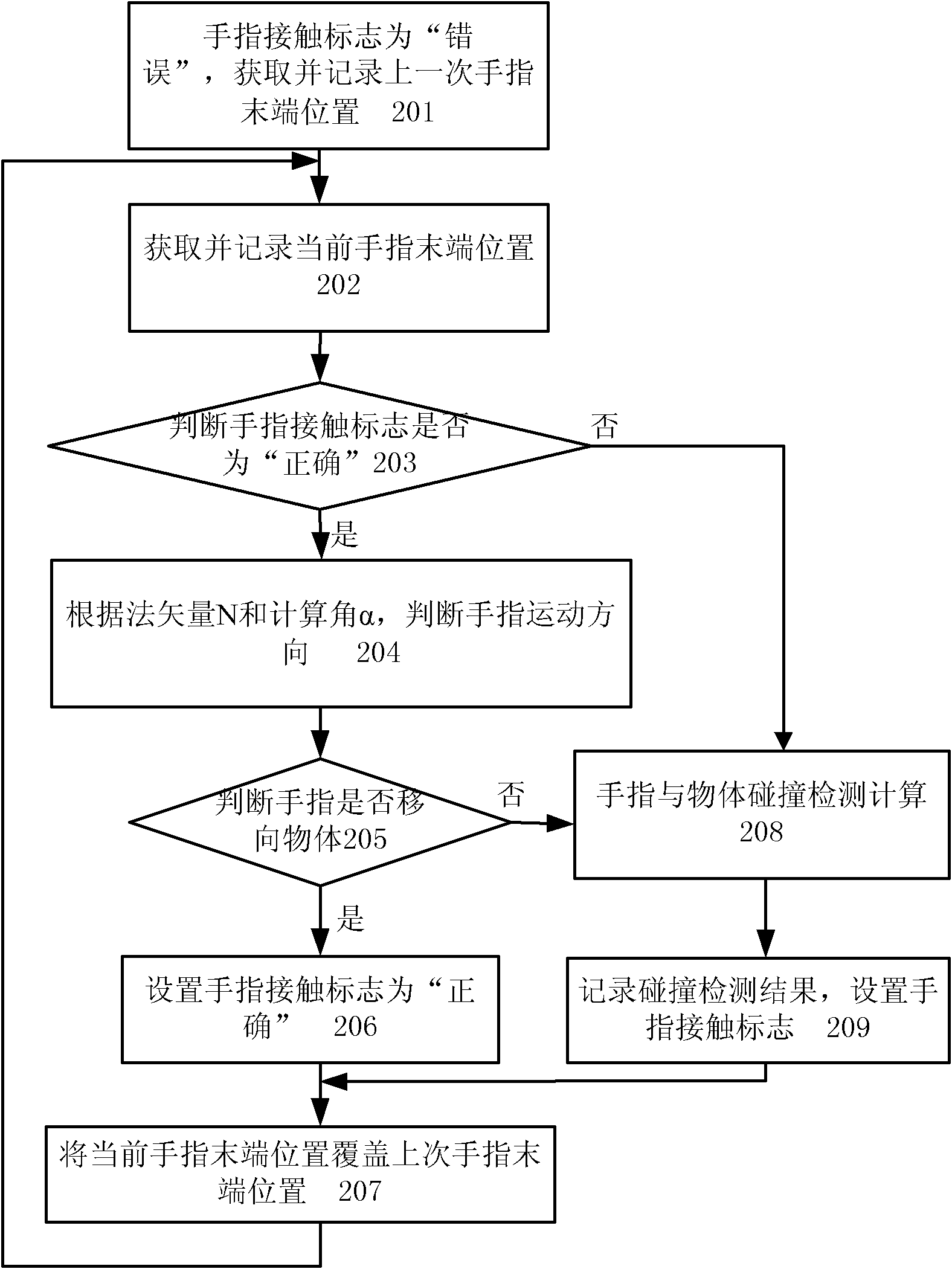
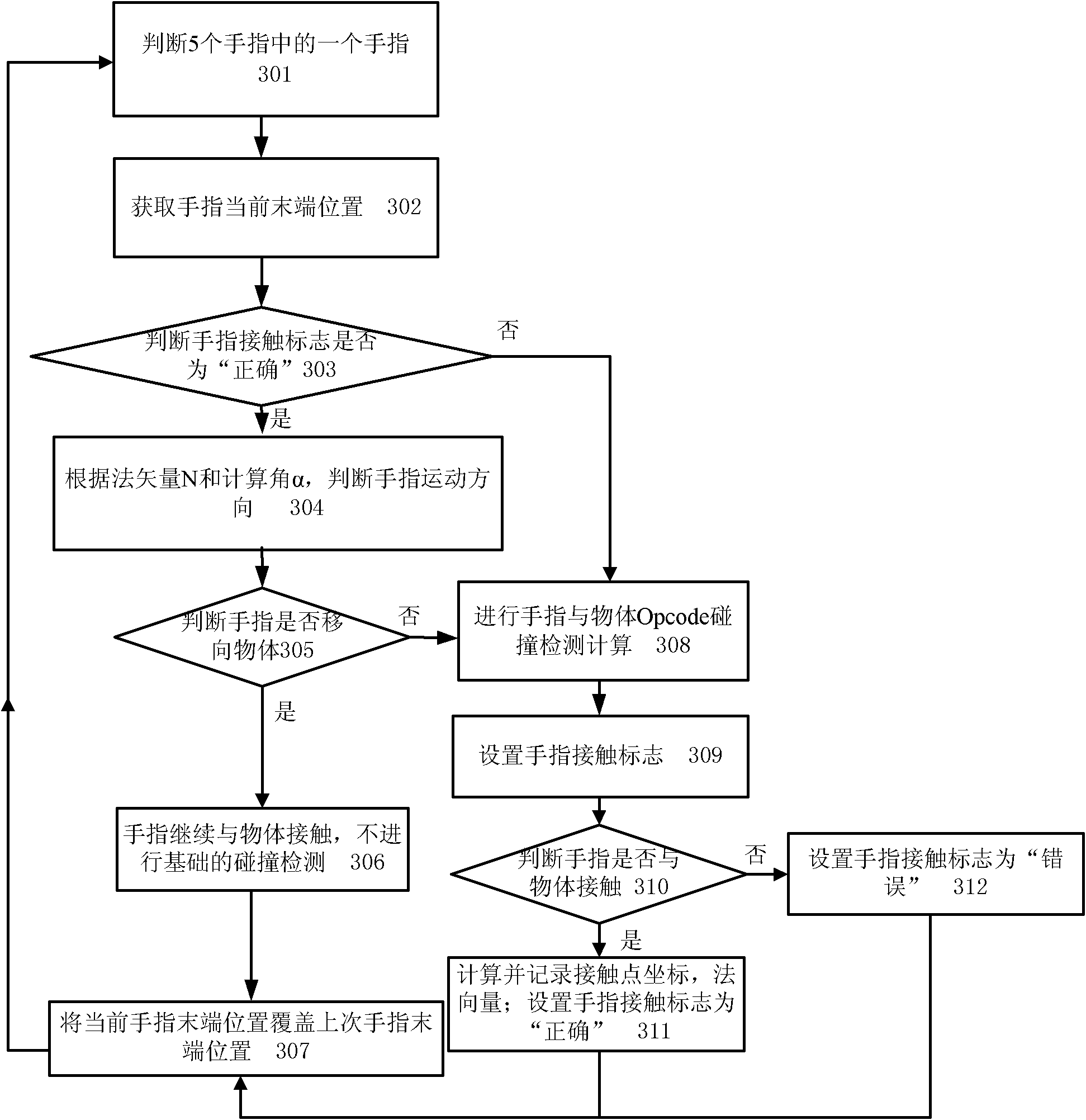
[0056] People wear data gloves to control the movement of various parts of the virtual hand in the virtual environment. When the virtual finger grasps the object, a quantitative value is used to judge the relative motion direction of the two objects. If the two objects move towards each other, the object is in the In the case of contact in the previous frame, this frame will continue to be in contact, and the actual collision detection calculation will not be performed in this frame (best case); if the two objects are moving backwards, then the two objects may continue to contact or may not contact , needs to be determined by substantial collision detection (using static collision detection algorithm libraries such as Opcode, etc.) calculations. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More