

Object-oriented parallel collision detection method, device and system
A collision detection, object-oriented technology, applied in the field of collision detection, can solve the problems of low detection accuracy, troublesome update, increase the number of collision detection, etc., to achieve the effect of reducing complexity, ensuring uniqueness, and improving collision detection speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
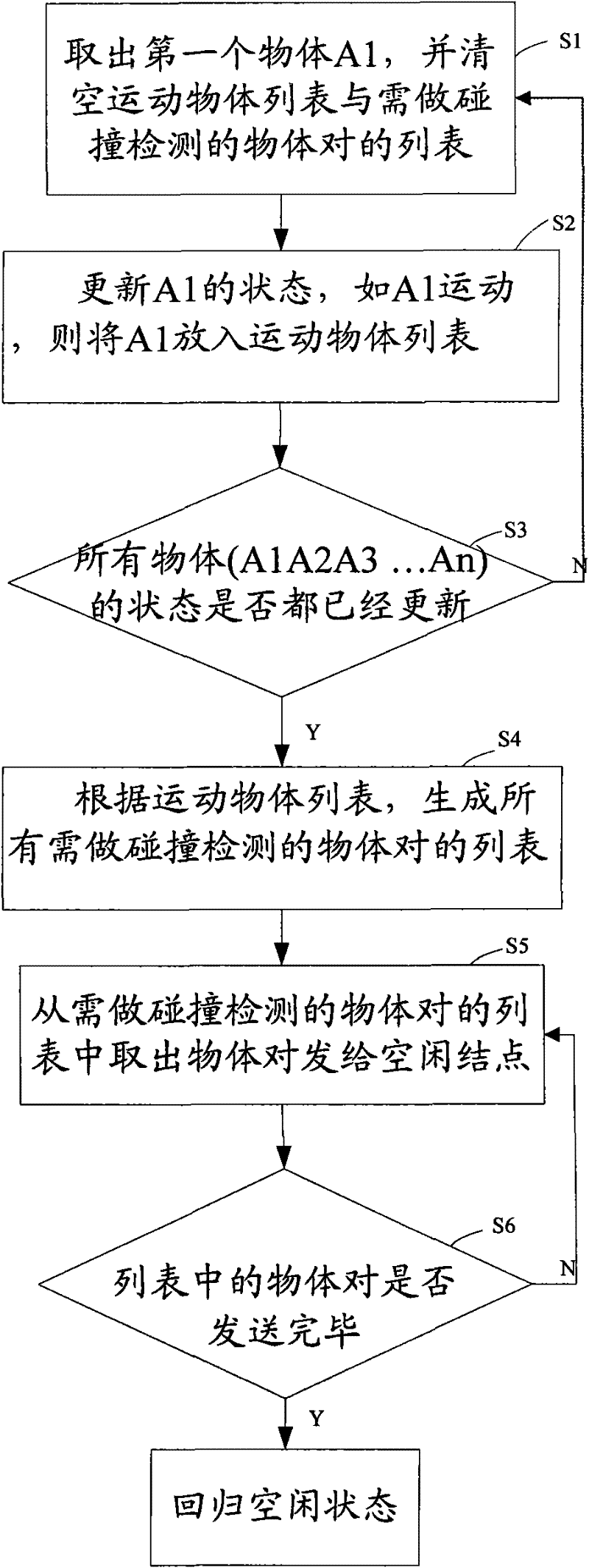
[0042] Embodiments of the present invention provide an object-oriented parallel collision detection method, device, and system. The main control node generates a list of all object pairs that need to be detected for collision according to the list of moving objects, and the idle node sends a message to the main control node. Request information for collision detection. After receiving the information requesting collision detection, the main control node assigns the object pairs in the list of object pairs to be detected for collision to each idle node for parallel collision detection. In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
[0043] The model of the object is represented by a polyhedron of arbitrary shape. In the object-oriented collision detection method of the embodiment of the present invention, an ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More