

Systems and methods for editing and controlling the behavior of a mobile robot
A robotic and behavioral technology, applied in general control systems, control/regulation systems, program-controlled manipulators, etc., to solve unresolved, interrupted, and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
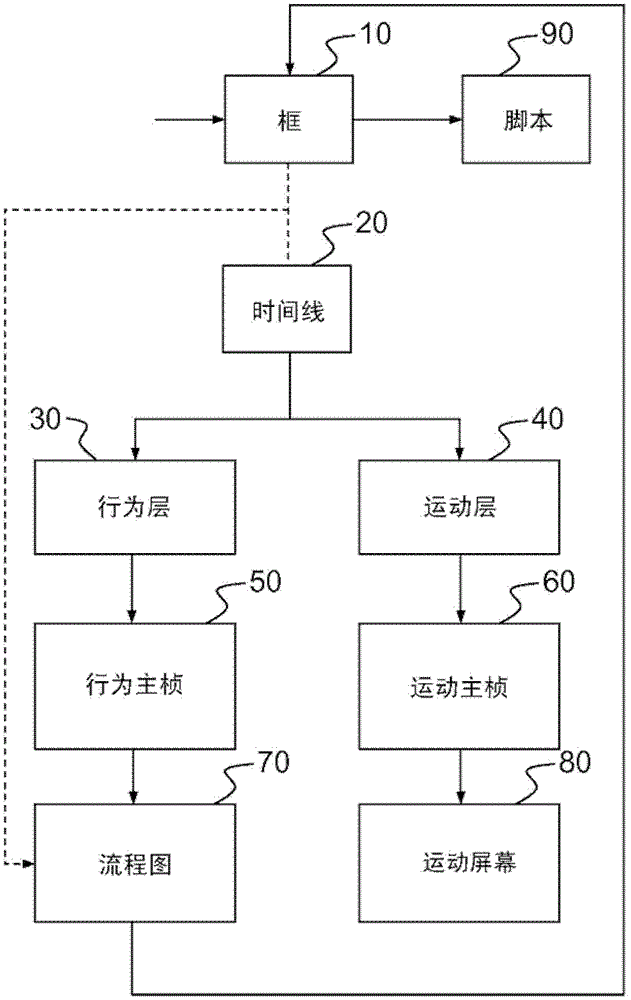
[0032] figure 1 is a diagram of the functional architecture for editing and programming the behavior of the robot in one embodiment of the present invention.
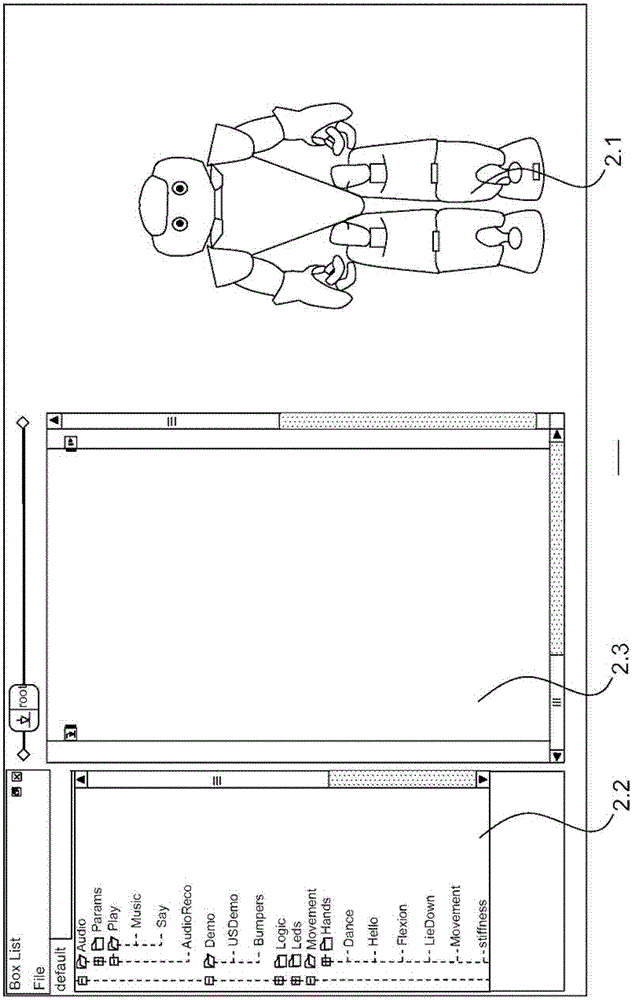
[0033] The robot controlled by the method and system of the present invention may be a humanoid robot having a head, a torso and limbs, each of which is articulated, and each joint is controlled by one or more motors. The present invention enables a user of the system to control such a robot by establishing behaviors that are simulated on a virtual robot and executed on a real robot connected to the system by a wired or wireless link.
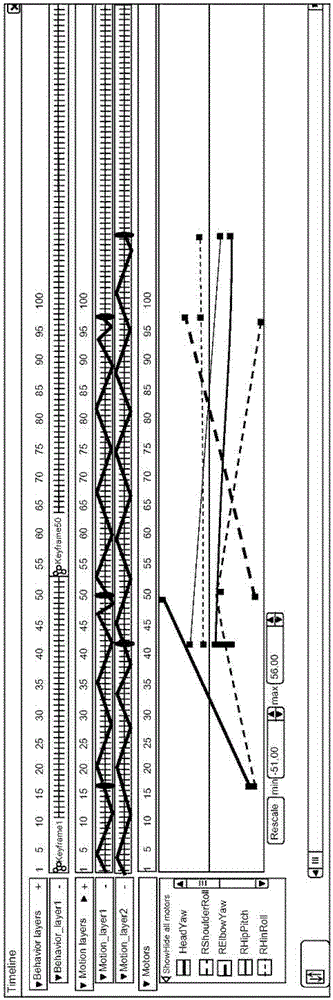
[0034] It involves viewing, simulating and causing actions to be performed on the screen of a computer programmed for that purpose (such as walking - n steps straight forward, right or left; "hello" - one of the arms is Movements above the head; speech, etc.) and movements (of the head, parts of the limbs, given angles).
[0035] The drawings illustrate the manner of command concatenat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More