

Three-drive extensible dexterous mechanical arm
A manipulator, three-drive technology, applied in manipulators, program-controlled manipulators, joints, etc., can solve the problems of unfavorable energy saving, increase the structural complexity of space manipulators, increase the mass and moment of inertia of space manipulators, and achieve structural Compactness, high degrees of freedom, and overall light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The structure of the mechanical arm will be further described below in conjunction with the accompanying drawings.
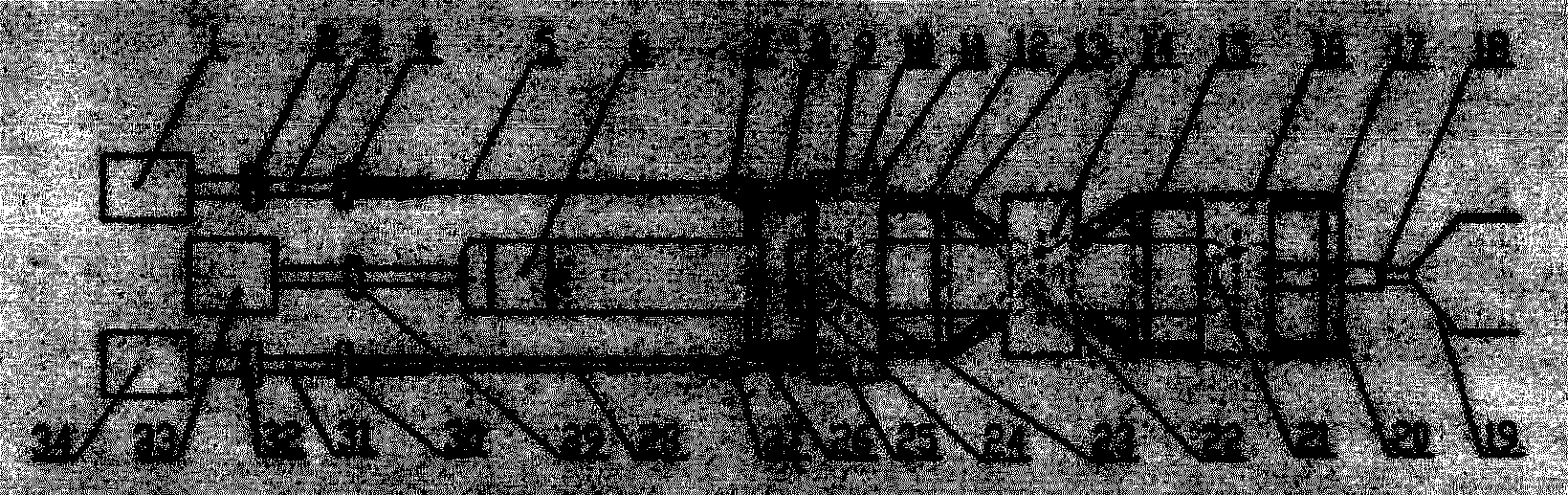
[0035] Such as figure 1 , 2 As shown, three driving units 1, 33, 34 provide power for the entire mechanical arm, wherein the output ends of the driving units 1, 34 are respectively connected with the lead screws 3, 31 through the couplings 2, 32; the lead screws 3, 31 Lead screw nuts 4, 30 are respectively installed on the top, and lead screw nuts 4, 30 are respectively connected with push rods 5, 28, which can push the push rods to do reciprocating linear motion; 26 is connected with the outer wall of the deflection ring 10. Through the sliding of the lead screw nuts 4 and 30, the push rods 5 and 28 are pushed respectively, and the force transmission of the connecting rods 8 and 26 can control the deflection of the deflection ring 10; the output end of the drive unit 33 is connected to the The first joint input end 6 is connected to drive the first jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More